Принцип действия и основные параметры индуктивных датчиков положения | RuAut
Самым распространенным типом устройств в составе существующих АСУ ТП являются индуктивные датчики положения, их количество превышает 90% от всех применяемых дискретных датчиков положения. Любой технологический процесс в практически любой отрасли промышленности (пищевая, машиностроение, нефтегазовая, энергетика) требует отслеживать положение заслонок, приводов, клапанов, деталей и заготовок, подвижных элементов конструкций агрегатов и т.д. в автоматическом режиме.
Повсеместному распространению индуктивных датчиков послужили их надежность, отличные эксплуатационные характеристики и сравнительно низкая стоимость. Основными рабочими характеристиками индуктивных датчиков положения являются: диапазон срабатывания, степень защиты, рабочая температура и частота отклика.
Принцип действия индуктивных датчиков заключается в следующем. При подаче питания на датчик возбуждается первичная обмотка от переменного напряжения резонатор и тем самым создает вблизи себя электромагнитное поле. При помещении в зону действия электромагнитного поля металлического объекта, который, по сути, становится вторичной обмоткой, начинают наводиться токи вихревого характера, так называемые токи Фуко. Такое явление ведет к ухудшению добротности первичной обмотки, что в свою очередь приводит к изменению в сторону уменьшения амплитуды сигнала резонатора, из-за чего срабатывает компаратор (триггер Шмидта), далее сигнал усиливается посредством усилителя и выдается на выход датчика.
Параметры индуктивных датчиков положения и рекомендации по их применению
Чтобы правильно подобрать индуктивный датчик под определенную задачу необходимо знать ряд основных параметров, а также за какие функции эти параметры отвечают.
Наверное, главным параметром, указанным в паспорте на датчик является номинальный диапазон срабатывания. Он обозначается как Sn. Номинальный диапазон срабатывания, хотя и является основным параметром, но практического значения особо не имеет. Так как его значение получается при ряде ограничений связанных с внешними факторами, а именно: температура окружающей среды 20 градусов Цельсия, питающее напряжение 24 В постоянного или же 230 В переменного тока. А в качестве объекта должна использоваться стальная пластина, выполненная из определенной стали, квадратной формы с шириной в 3 раза больше ширины значения Sn и толщиной 1мм. Практическое же значение имеют такие параметры, как эффективный диапазон срабатывания Sr и полезный диапазон срабатывания Su. Значение Sr варьируется в пределах плюс минус 10% от номинального диапазона срабатывания, а измеряется в температурном диапазоне от 18 до 28 градусов Цельсия и при номинальном напряжении питания. Полезный диапазон срабатывания индуктивного датчика варьируется в пределах плюс минус 10% от эффективного и измеряется при напряжении питания равного 85% — 110% от номинального и температуре от -25 до +70 градусов Цельсия. Часто в техническом описании на датчик можно встретить такой параметр, как
Помимо свойств присущих непосредственно самому индуктивному датчику положения на диапазон срабатывания влияют свойства материала объекта, речь идет об электропроводимости и магнитной проницаемости. Для этого было введено понятие коэффициента редукции. Эталонным материалом считается Сталь 37, ее коэффициент редукции равен 1. Для других металлов коэффициент редукции имеет значение меньше 1. Например, нержавейка имеет коэффициент редукции 0.85, а медь всего лишь 0.3. То есть, если объектом срабатывания является медь, то диапазон срабатывания уменьшается до значения равного 0.3Sn .
Далее описываются другие, но не менее важные параметры индуктивных датчиков положения.
Напряжение питания датчика
Питание индуктивных датчиков может осуществляться как от источников постоянного тока, так и источников переменного тока. Для постоянного тока характерны диапазоны напряжений: 10-30В, 10-60В и 5-60В. Для переменного тока характерен диапазон: 98-253В. Также существуют индуктивные датчики имеющие универсальное питание, такие датчики можно запитать как от источника постоянного, так и от источника переменного тока.
Номинальный ток нагрузки
Параметр показывает, на какое значение тока рассчитан датчик при действии нагрузки продолжительный интервал времени. Стандартным является значение равное 200мА, но бывают спец исполнения датчиков рассчитанные и на 500мА.
Частота отклика
Параметр показывает, с какой максимальной частотой, выраженной в герцах, датчик может осуществлять переключения. Для большинства промышленных применений хватает частоты отклика равной 1000Гц, а вот поднимать частоту выше 5кГц производителям датчиков нет особого смысла, так как такая частота будет выше, частоты выполнения стандартного цикла промышленного контроллера (ПЛК). Тем самым состояние такого датчика может быть неверно интерпретировано модулем ввода ПЛК.
При выборе датчиков также стоит обратить на степень защиты корпуса от брызг и пыли, и диапазон температуры при котором может работать индуктивный датчик. Стандартными являются степень защиты IP67, а температурный диапазон от минус 25 до плюс 70 градусов Цельсия.www.ruaut.ru
Индуктивные датчики. Устройство, типы и виды индуктивных датчиков.
Индуктивные датчики
применяются для преобразования в электрический сигнал небольших линейных и угловых перемещений. Простейший индуктивный датчик (называемый однотактным) представляет собой катушку индуктивности 1 с железным сердечником 2 и подвижным якорем З, отделенным от сердечника воздушным зазором (рис. 2-4). Катушка индуктивности с сердечником, называемая статором датчика, закрепляется неподвижно, а якорь соединяется механически с подвижной частью ОУ, перемещение которой нужно преобразовывать в электрический сигнал. При перемещении якоря изменяется сопротивление магнитной цепи датчика вследствие изменения воздушного зазора δ между статором и якорем (при вертикальном движении якоря) или площади воздушного зазора S (при горизонтальном движении якоря).Сопротивление магнитной цепи датчика складывается из сопротивления участка цепи со сталью Rст и сопротивления участка цепи с воздушным зазором Rв. Магнитное сопротивление участка цепи со сталью:
Rст = Lст/(mст/Sст),
где Lст — суммарная длина средней магнитной силовой линии в стали сердечника и якоря; Sст — площадь поперечного сечения стального сердечника; mст — магнитная проницаемость материала сердечника и якоря.
Магнитное сопротивление участка цепи с воздушным зазором:
Rст = 2δ/(μоSв), где δ — длина воздушного зазора между статором и якорем датчика; μо — проницаемость воздуха; Sв — площадь поперечного сечения воздушного зазора. Так как μо>>μо, то Rст0 . сопротивление магнитной цепи датчика будет определяться в основном сопротивлением участка цепи с воздушным зазором:
Rм ≈ Rв = 2δ/(;μоSr)Переменный магнитный поток Ф, возникающий при подключении источника питания к катушке датчика, равен
Ф = Iω/Rмгде I — ТОК в цепи катушки датчика; w — число витков катушки датчика,w — число витков катушки датчика.
Индуктивность катушки датчика (если пренебречь потоком рассеяния):
L = ωФ/I = [ω2/2δ]μSФормула (2-1) устанавливает функциональную связь между перемещением якоря индуктивного датчика (при перемещении изменяется или d, или Sв) и индуктивностью катушки датчика.
У индуктивных датчиков с изменяющимся воздушным зазором статическая характеристика L=f(x) нелинейная (рис. 2-5, 1) и при больших зазорах (δ > 1 мм) чувствительность датчика уменьшается. Такие датчики используют при ограниченном диапазоне перемещения якоря — до 1 мм, а начальная рабочая точка выбирается в области характеристики, где она имеет наибольшую крутизну и приближается к линейной чувствительность датчиков с изменяющимся воздушным зазором высокая – до 0,2 мкм.
У индуктивных датчиков с изменяющейся площадью воздушного зазора статическая характеристика L=f(Sв) линейная, диапазон перемещения якоря шире — до 8 мм, но чувствительность меньше — до 0,3 мкм (рис. 2-5, 2). Изменение индуктивности катушки датчика L приводит к изменению ее индуктивного сопротивления: ХL = ωL, где ω — круговая частота питающего напряжения. Следовательно, происходит и изменение полного сопротивления катушки: Z = √Rа*2+XL*2, где Ra — активное сопротивление катушки датчика.
Ток I, протекающий в катушке датчика под действием приложенного переменного напряжения U, также изменяется при перемещении якоря и может служить выходным сигналом датчика (выходной характеристикой). Условно принцип работы индуктивных датчиков можно представить в виде цепи преобразований происходящих при перемещении якоря датчика (для датчиков с изменяющимся воздушным зазором):
x↑ → δ↑ → Rm↑ → Ф↓ → L↓ → Xl↓ → Z↓ → I↑Однотактные индуктивные датчики имеют высокую чувствительность и надежность, практически неограниченный срок службы, большую мощность выходного сигнала (до нескольких ватт), что позволяет в ряде случаев не применять усилитель. К недостаткам индуктивных датчиков следует отнести нереверсивность характеристики, небольшой диапазон перемещений якоря, наличие тока холостого хода и электромагнитной силы притяжения между якорем и статором, влияние колебаний амплитуды и частоты напряжения питания. Эти недостатки полностью или частично отсутствуют у дифференциальных индуктивных датчиков.
Дифференциальный индуктивный датчик
Он содержит два статора с катушками индуктивности L1 и L2 и один общий якорь. При перемещении якоря индуктивность одной катушки увеличивается, другой — уменьшается. Катушки индуктивности включаются или в дифференциальную измерительную схему, или как смежные плечи в мостовую измерительную схему.
Дифференциальные индуктивные датчики по сравнению с однотактными имеют более высокую точность преобразования и чувствительность. Статическая характеристика этих датчиков линейная и реверсивная.
Трансформаторные датчики
Они являются разновидностью индуктивных датчиков. Трансформаторный датчик можно рассматривать как трансформатор, у которого коэффициент трансформации изменяется за счет изменения коэффициента взаимоиндуктивности М между его обмотками. Такие датчики применяются для преобразования в электрический сигнал (напряжение переменного тока) небольших линейных и угловых перемещений.
На рис. 2-6 представлен дифференциальный трансформаторный датчик с угловым перемещением якоря. Первичная обмотка датчика ω1 расположена на центральном стержне сердечника 1 и подключена к источнику переменного тока. Вторичные обмотки ω2а и ω2б расположены на крайних стержнях и соединяются последовательно и встречно. Ток, протекающий по ω1 создает переменный магнитный поток Ф1, разветвляющийся на два потока: Ф1а и Ф1б. При симметричном положении якоря 2 по отношению к статору датчика (сердечник 1 с обмотками ω1, ω2а и ω2б) магнитные потоки равны: Ф1а=Ф1б=Ф1/2, и ЭДС, индуцирующиеся во вторичных обмотках, будут также равны: Е2а=Е2б.
Так как фазы этих ЭДС противоположны (за счет встречного включения обмоток ω2а и ω2б), то напряжение на выходе датчика будет равно нулю: Uвых = Е2а — Е2б=О. При повороте якоря, который механически связан с подвижной частью объекта управления, изменяются площади поперечного сечения воздушных зазоров и между якорем и крайними стержнями сердечника. В результате этого изменятся сопротивления RM1 и RM2 магнитных цепей потоков Ф1а и Ф1б, да и сами потоки: один из них увеличивается на ΔФ, а другой уменьшится на ΔФ. Индуцирующие во вторичных обмотках ЭДС Е2а и Е2б также изменятся пропорционально изменению потоков ФIа и Ф2б. На выходе датчика появится напряжение Uвых, амплитуда которого равна разности амплитуд ЭДС Е2а и Е2б: Uвых = Е2а-Е2б, а фаза выходного напряжения будет определяться фазой большей из ЭДС.
Таким образом, характеристика такого датчика будет реверсивной и линейной (в рабочей зоне). Чувствительность дифференциального трансформаторного датчика в два раза выше, чем у однотактного, рабочая зона в два раза больше, и при симметричном положении якоря выходное напряжение равно нулю. Точность преобразования у дифференциальных трансформаторных датчиков выше, так как ввиду симметричности конструкции и схемы датчика частично взаимно компенсируются погрешности от изменения окружающей температуры и частоты источника питания.
www.eti.su
«Принцип работы индуктивных датчиков?» – Яндекс.Знатоки
Чтобы понять принцип работы индуктивного датчика, разберём его составляющие.
Состоит индуктивный датчик:
1. Электромагнитная система → 2. Генератор → 3. Демодулятор → 4. Пороговое устройство → 5. Выходной усилитель
1 – электромагнитная система.
Её также называют чувствительным элементом датчика. Электромагнитная система является частью генератора.
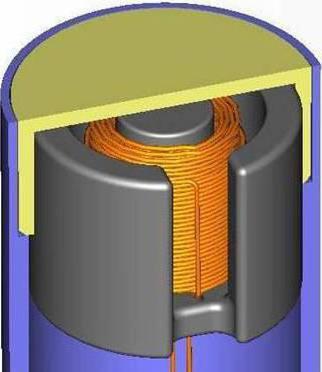
Она представляет собой катушку индуктивности, помещенную в магнитопровод. Чаще всего это круглая ферритовая чашка. Чашки в зависимости от габаритов датчика могут иметь диаметр от 3,3 мм до 150 мм.
С внешней стороны ферритовый сердечник закрыт диэлектрическим колпачком. Его торцевая часть называется чувствительной поверхностью.
Область перед чувствительной поверхностью является зоной чувствительности датчика. Там сконцентрировано магнитное поле. Оно распространяется примерно на половину диаметра датчика.
2 — генератор.
Это та часть электронной схемы датчика, которая вырабатывает электрические колебания. Генератор формирует переменное электромагнитное поле, в сечении напоминающее букву М.
Катушка индуктивности и конденсатор (устройство для накопления заряда и энергии электрического поля) образуют колебательный контур. Генератор вырабатывает незатухающие синусоидальные колебания. При попадании металлического объекта в зону чувствительности датчика в нём образуются вихревые токи. Они создают встречный магнитный поток, демпфирующий колебания контура. Другими словами, происходит затухание электромагнитных колебаний, уменьшается их амплитуда. Чем ближе металлический объект к чувствительной поверхности датчика и чем больше его размер, тем сильнее затухание.
3 — демодулятор или детектор, он же выпрямитель.
Преобразует изменение высокочастотных колебаний генератора в изменение постоянного напряжения.
4 — пороговое устройство сравнивает переданное демодулятором напряжение с заранее установленным порогом срабатывания.
При достижении порога формируется логический сигнал «0 или 1» (т. е. «выключение / или включение»). Таким образом, пороговое устройство преобразует аналоговый сигнал детектора в «цифровой»выходной, его ещё называют дискретным.
В качестве порогового устройства используются как транзисторные, так и микросхемные варианты компараторов и триггеров Шмитта.
Особенностью порогового устройства является то, что пороги переключения из «0» в «1» и из «1» в «0» не совпадают. Это делается преднамеренно для повышения помехоустойчивости датчика. Данное свойство называют гистерезисом.
5 — выходной усилитель увеличивает мощность выходного сигнала до необходимого значения для передачи последующим устройствам.
Выходной усилитель часто называют выходным ключом, так как он оперирует логическими значениями 0 и 1.
В качестве выходного ключа могут использоваться транзисторы разных типов, тиристоры (симисторы), реле электромагнитные, реле твердотельные, оптроны, специализированные микросхемы (интеллектуальные ключи).
Электромагнитная система, генератор, демодулятор, пороговое устройство и выходной усилитель являются основой индуктивных датчиков.
Подытожим:
Принцип действия индуктивного датчика основан на изменении параметров электромагнитного поля при вхождении металлического объекта в зону чувствительности. Эти изменения фиксируются электронной схемой датчика и изменяют его состояние. В результате этого происходит коммутация выходных цепей: размыкание нормально замкнутого, замыкание нормально разомкнутого или переключение контактов.
yandex.ru
3.5. Индуктивные датчики
Принцип действия индуктивных датчиков основан на изменении индуктивности L или взаимоиндуктивности обмотки с сердечником вследствие изменения магнитного сопротивления Rmмагнитной цепи датчика, в которую входит сердечник.
Индуктивные датчики относятся к классу параметрических. Измеряемое перемещение на входе датчика вызывает изменение параметров магнитной и электрической цепей, что, в свою очередь, вызывает изменение выходной величины — электрического тока I или напряжения U.
С помощью индуктивных датчиков можно контролировать механические перемещения, силы, температуру, свойства магнитных материалов, определять наличие дефектов, контролировать диаметр стальной проволоки, толщину немагнитных покрытий на стали и др.
Индуктивные датчики отличает ряд достоинств: простота и прочность конструкции, надежность в работе, отсутствие скользящих контактов, большая величина мощности на выходе (до нескольких десятков ватт), высокая чувствительность (до 100 В/мм).
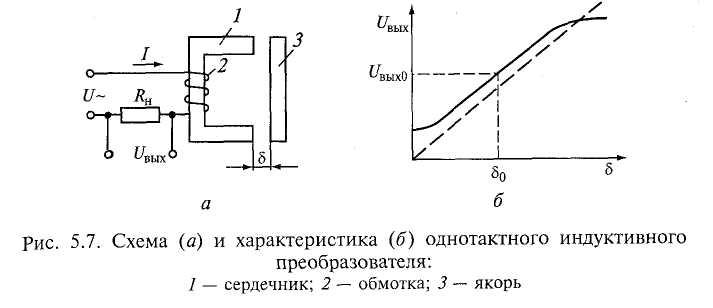
Рисунок 3.7 Схема (а) и характеристика (б) индуктивного преобразователя:
1- сердечник; 2- обмотка; 3- якорь.
К достоинствам рассмотренных индуктивных трансформаторных датчиков следует отнести:
достаточно высокую выходную мощность, позволяющую во многих случаях обойтись без усилительных устройств;
высокие чувствительность и разрешающую способность;
сравнительную простоту конструкции; высокую надежность;
малые массу и размеры при расчете на напряжение повышенной частоты;
невысокую стоимость.
Недостатками рассмотренных измерительных преобразователей являются:
трудность регулировки и компенсации начального напряжения на их выходе;
необходимость экранирования для уменьшения уровня помех, что обусловливает увеличение размеров и массы;
возможность работы только на переменном токе;
ограниченность диапазона линейной статической характеристики.
3.6. Емкостные датчики
П ринцип
действия емкостных измерительных
преобразователей основан на изменении
емкости конденсатора под воздействием
входной преобразуемой величины. Емкость
конденсатора:
ринцип
действия емкостных измерительных
преобразователей основан на изменении
емкости конденсатора под воздействием
входной преобразуемой величины. Емкость
конденсатора:
где ε — относительная диэлектрическая проницаемость диэлектрика;
ε0 — диэлектрическая проницаемость вакуума;
S — площадь пластины;
δ — толщина диэлектрика или расстояние между пластинами.
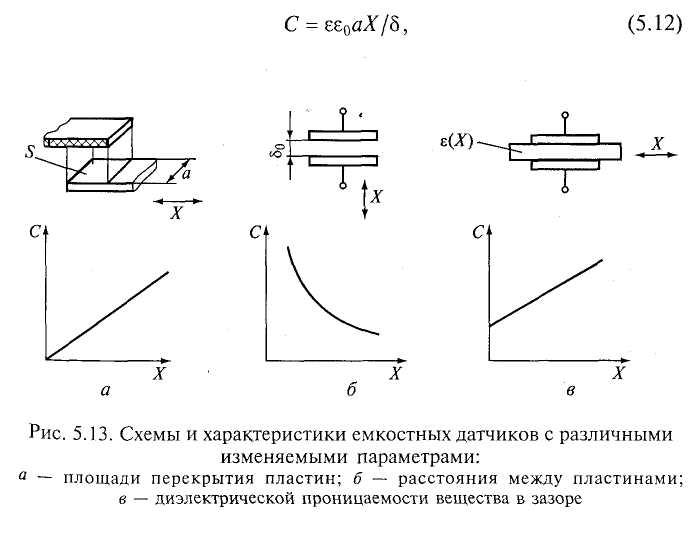
Емкостные преобразователи используют для измерения угловых и линейных перемещений, линейных размеров, уровня, усилий, влажности, концентрации и др. Конструктивно они могут быть выполнены с плоскопараллельными, цилиндрическими, штыревыми электродами, с диэлектриком между пластинами и без него.
Е мкостный
плоскопараллельный измерительный
преобразователь с изменяемой площадью
перекрытияS
(cм.
рис. 3.8, а)
описывается
уравнением преобразования:
мкостный
плоскопараллельный измерительный
преобразователь с изменяемой площадью
перекрытияS
(cм.
рис. 3.8, а)
описывается
уравнением преобразования:
где а — ширина пластин конденсатора;
X — длина перекрытия электродов.
а) б) в)
Рисунок 3.8 Схемы емкостных датчиков с различными измеряемыми параметрами.

Рисунок 3.9 Емкостной датчик для измерения угловых велечин
Емкостные преобразователи перемещения с переменной площадью перекрытия (рис. 3.9) используют и для измерения угловых величин. В этом случае емкость измерительного преобразователя:
(3.2)
а чувствительность:
(3.3)
где r2, r1 — соответственно наружный и внутренний радиусы пластин;
φ, φ0 — соответственно текущий (измеряемый) и начальный углы перекрытия пластин.
Е мкостный
плоскопараллельный преобразователь
перемещения с изменяющимся воздушным
зазором(см.
рис. 3.8, б) имеет
нелинейную характеристику. Изменение
его емкости описывается уравнением:
мкостный
плоскопараллельный преобразователь
перемещения с изменяющимся воздушным
зазором(см.
рис. 3.8, б) имеет
нелинейную характеристику. Изменение
его емкости описывается уравнением:
где δ0 — начальный зазор;
X — перемещение пластины.
В связи с нелинейностью статической характеристики такие датчики применяют для измерения относительно малых перемещений, обычно не более 0,1δ0.
Преобразователи с изменяемой диэлектрической проницаемостью среды ε между электродами (см. рис. 3.8, в) широко используют для измерения уровня жидких и сыпучих веществ, анализа состава и концентрации веществ в химической, нефтеперерабатывающей и других областях промышленности, для счета изделий, охранной сигнализации и т.п. Они имеют линейную статическую характеристику.
Емкость измерительных преобразователей в зависимости от конструктивных особенностей колеблется от десятых долей до нескольких тысяч пикофарад, что приводит к необходимости использовать для питания датчиков напряжение повышенной частоты — от 1•103 до 108 Гц. Это один из существенных недостатков подобных преобразователей.
К достоинствам емкостных измерительных преобразователей можно отнести простоту конструкции, малые размеры и массу, высокую чувствительность, большую разрешающую способность при малом уровне входного сигнала, отсутствие подвижных токосъемных контактов, высокое быстродействие, возможность получения необходимого закона преобразования за счет выбора соответствующих конструктивных параметров, отсутствие влияния выходной цепи на измерительную.
Недостатки емкостных измерительных преобразователей состоят в относительно низком уровне выходной мощности сигналов, нестабильности характеристик при изменении параметров окружающей среды, влиянии паразитных емкостей.
studfile.net
принцип работы, выбор — Asutpp
 Фото: индуктивные датчики
Фото: индуктивные датчикиКак известно, автоматизация систем управления технологическими процессами – система многоуровневая. И в зависимости от поставленной задачи в той или иной отрасли, на разных уровнях, для её решения применяются различные специализированные средства. Благо, прогресс это позволяет.
В этой статье поведем речь о таком полезном изобретении промышленности автоматизации, как индуктивные датчики. Что же они собой представляют, где используются и по каким критериям выбираются? Попробуем вместе разобраться с этими вопросами.
Прежде всего, индуктивный датчик – это бесконтактный выключатель, который не содержит подвижных деталей и практически не подвергнутый к воздействию окружающей среды (за частую, степень защиты – IP67).
Основное предназначение – бесконтактный контроль положения предметов, изготовленных из электропроводных или магнитопроводных материалов. Проще говоря, для регистрации металлических объектов. Выпускаются в разнообразных исполнениях, с различными характеристиками, с дискретными и аналоговыми выходами.
На сегодняшний день существует множество задач, связанных с использованием индуктивных датчиков. Широкое применение они нашли в упаковочных машинах, машинах переработки пластмасс, в сборочных линиях и системах транспортеров. При подключении к обычным счетчикам импульсов, получаем простое и одновременно надежное устройство счета. Эта функция так же используется в различных отраслях.
При выборе индуктивного датчика следует обращать внимание на следующие детали:
- Исполнение. Чаще всего имеет цилиндрическую форму с нарезанной резьбой по всей длине датчика. Стандартная линейка классификации по резьбе – М5,М8,М12,М18 и М30. Материал – нержавейка. Крепление осуществляется с помощью двух гаек, которые накручиваются на корпус.
- Расстояние срабатывания. Напрямую зависит от характеристик встроенного генератора, на который влияют вихревые токи «измеряемого» предмета. Диапазон варьируется от 1мм….до25-30мм, в зависимости от производителя.
- Тип выхода. Прежде всего классифицируются на аналоговый (1-10В,4-20mA) и дискретный. Дискретный в свою очередь, отталкиваясь от типа транзисторного выхода вторичного прибора, разнится на PNP-тип и NPN-тип . Так же немаловажно определиться, будет ли это нормально открытый выходной элемент (NO) или же нормально закрытый (NC).
- Напряжение питания. Постоянный ток – 10….30VDC; Переменный ток – 20….265VAC.
- Монтаж. Можно выделить два основных типа: скрытый и выступающий.
- Электрическое подсоединение. Обычно используется двухпроводный или трехпроводный кабель, но имеет место и коннекторное подключение.
Что ж, подводя итог, стоит еще отметить тот факт, что индуктивные датчики очень удобные в эксплуатации, не занимают много времени при инсталляции и монтаже, а так же вполне доступны по своей ценовой категории. Помните, правильный выбор маленькой детали – залог безотказной работы всего механизма.
www.asutpp.ru
3. Дифференциальные (реверсивные) индуктивные датчики
Дифференциальные индуктивные датчики представляют собой совокупность двух одинарных (нереверсивных) датчиков с общим якорем. Предназначены дифференциальные индуктивные датчики для получения реверсивной статической характеристики и для компенсации электромагнитной силы притяжения якоря.
Рассмотрим
работу дифференциального индуктивного
датчика (рис. 3, а), состоящего
из двух одинаковых сердечников 1 и 2 с
обмотками и расположенного между
сердечниками якоря 3, способного
перемещаться влево и вправо относительно
среднего симметричного положения.
Питание дифференциального датчика
осуществляется от трансформатора с
выводом от средней точки вторичной
обмотки. Сопротивление нагрузки RH включается
между этой средней точкой и общей точкой
обмоток сердечников 1 и 2. Ток
в сопротивлении нагрузки можно представить
как алгебраическую сумму двух токов: в
левом и правом контурах. Каждый контур
состоит из половины вторичной обмотки
трансформатора, одинарного индуктивного
датчика и сопротивления нагрузки RH, общего
для обоих контуров. Рассмотрим направления
контурных токов в момент времени, когда
во вторичной обмотке трансформатора
индуцируется условно положительный
полупериод напряжения: плюс — у левого
зажима; минус — у правого. Полярность
средней точки относительно левого
зажима будет минусовая, а относительно
правого — плюсовая. Принимая за
положительное направление тока во
внешней цепи от плюса к минусу, определяем,
что ток левого контура I1 направлен сверху вниз, а ток правого
контура I2 — снизу вверх. Следовательно, эти токи
вычитаются, а через нагрузку пойдет
разностный ток. В следующий полупериод
полярность изменится на противоположную
(на рис. 3 показана в скобках). Соответственно
изменится направление токов в нагрузке,
но опять ток в нагрузке будет равен
разности токов I1 и I2 (направление их показано пунктиром).
Очевидно, что каждый из этих контурных
токов можно определить по формулам (11)
или (13). При среднем (симметричном)
положении якоря 3 индуктивности
обмоток 1 и 2 одинаковы.
Следовательно, токи I1 и I2 равны, разность их равна нулю, выходной
сигнал (ток в сопротивлении нагрузки)
равен нулю:  .
.
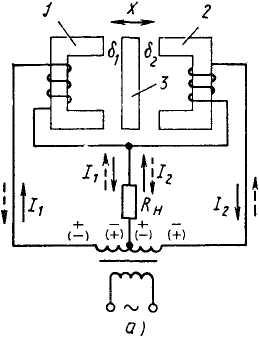
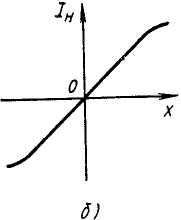
Рис. 3. Дифференциальный индуктивный датчик
При перемещении якоря вправо (примем его за положительный входной сигнал) индуктивность L2 возрастает, поскольку воздушный зазор в одинарном индуктивном датчике 2 уменьшается, а индуктивность L1 убывает, поскольку зазор в датчике 1 увеличивается. Следовательно, I1> I2 и появляется выходной сигнал в виде тока нагрузки определенной полярности. При перемещении якоря влево (отрицательный входной сигнал) соответственно уменьшается L2 и увеличивается L1 соотношение токов I1< I2 и полярность тока нагрузки изменяется. Поскольку речь идет о переменном синусоидальном токе, это означает, что фаза тока изменяется на 180°. Таким образом, статическая характеристика дифференциального датчика (рис. 3, б) будет реверсивной, зависящей от знака входного сигнала. А дифференциальным датчик называется потому, что выходной сигнал формируется как разность сигналов двух одинаковых датчиков.
Силы притяжения якоря к сердечникам возникают и в этом случае, но направлены они в противоположные стороны и поэтому почти полностью взаимно компенсируются. Поэтому для перемещения якоря требуется незначительное усилие. Очень важной особенностью дифференциального датчика является равенство нулю выходного сигнала при нулевом входном сигнале. Напомним, что в одинарном датчике выходной сигнал (ток через обмотку) был не равен нулю даже при нулевом воздушном зазоре.
Для получения реверсивной статической характеристики используют и мостовую схему включения индуктивных датчиков (рис. 4, а, б). Плечи моста образованы обмотками двух сердечников 1 и 2 с индуктивностями соответственно L1 и L2 и двумя постоянными резисторами с сопротивлением R. К одной диагонали моста подводится напряжение питания U0 переменного тока, со второй диагонали снимается выходное напряжение Uвых. Если якорь 3 занимает среднее положение, то индуктивности L1 и L2 одинаковы и мост сбалансирован. Выходное напряжение Uвых при этом равно нулю. При отклонении якоря от среднего положения баланс моста нарушается, так как индуктивность одной обмотки увеличивается, а другой — уменьшается. Изменение направления перемещения якоря вызывает изменение фазы выходного напряжения на 180°, т. е. характеристика мостовой схемы индуктивных датчиков является реверсивной (см. рис. 3, б).
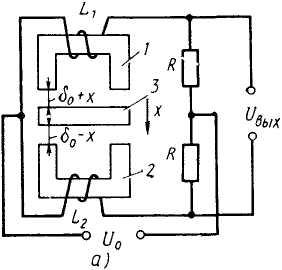
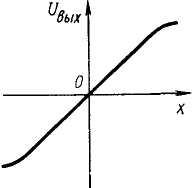
Рис. 4. Мостовая схема реверсивного индуктивного датчика
Оценим чувствительность датчика в мостовой схеме. Сначала преобразуем уравнение (12) для индуктивности:


где  — относительное перемещение якоря,
— относительное перемещение якоря, — индуктивность датчика при среднем
положении якоря, когда якорь3 находится
на одинаковом расстоянии от сердечников 1 и 2, равном
δ0.
Уравнение для помножим и поделим на (1
— σ):
— индуктивность датчика при среднем
положении якоря, когда якорь3 находится
на одинаковом расстоянии от сердечников 1 и 2, равном
δ0.
Уравнение для помножим и поделим на (1
— σ):
Уравнение для L2 помножим и поделим на (1 + σ):
Чувствительность
оценивается при малых входных сигналах,
когда х
< δ0 и
σ < 1. Поэтому  и
и  в знаменателе можно пренебречь. В первом
приближении для малых входных сигналов
принимаем
в знаменателе можно пренебречь. В первом
приближении для малых входных сигналов
принимаем
 ;
;  (21)
(21)
Полагая, что мост не нагружен, для установившегося режима можно записать выражение для выходного напряжения схемы:
 (22)
(22)
Формулу (22) можно упростить в предположении, что активные сопротивления обмоток (R1, R2) значительно меньше их индуктивных сопротивлений (ω L1, ω L2).
Подставляя
в (22) значения индуктивностей L1 и L2,
определяемых выражением (21), получим
для малых отклонений 
 (23)
(23)
Модуль выражения (23) определяет амплитуду выходного напряжения, а аргумент — фазу.
Амплитуда выходного напряжения
Чувствительность (или коэффициент преобразования) датчика определяется как производная выходного напряжения по перемещению при х = 0:
 (24)
(24)
Повысить чувствительность можно увеличением напряжения питания и снижением величины начального воздушного зазора, т. е. сближением сердечников 1 и 2.
Питание индуктивных датчиков всегда осуществляется переменным током, но с помощью выпрямительных схем выходной ток может быть и постоянным. Для того чтобы иметь реверсивную характеристику, используют фазочувствительный выпрямитель. Схема реверсивного индуктивного датчика с выходным постоянным током показана на рис. 5. Сердечники на схеме показаны Ш-образной формы. Такие сердечники используются чаще, чем П-образные, показанные на предыдущих рисунках, хотя принцип действия одинаков для датчиков с сердечниками разной формы. Выходной сигнал датчика снимается с помощью измерительного трансформатора 1 и подается на одну диагональ выпрямительного моста 3. Опорное напряжение снимается с трансформатора 2 и подается на другую диагональ моста 3. Нагрузка Rн включается между средними точками вторичных обмоток трансформаторов 1 и 2. При фазочувствительном выпрямлении изменение фазы сигнала на 180° приводит к изменению полярности выпрямленного напряжения.
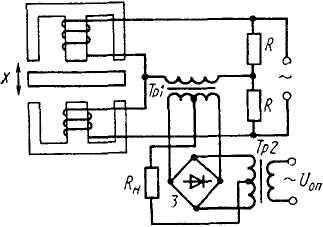 Рис.
5. Схема включения реверсивного
индуктивного датчика с выходным
постоянным током
Рис.
5. Схема включения реверсивного
индуктивного датчика с выходным
постоянным током
Следует отметить, что при неидентичности одинарных индуктивных датчиков, используемых в дифференциальной или мостовой схемах, возникает остаточное напряжение даже в среднем положении якоря. Это остаточное напряжение сдвинуто по фазе относительно напряжения питания, определяющего фазу полезного сигнала. Следовательно, остаточное напряжение может быть разложено на две составляющие. Одна составляющая, совпадающая по фазе с полезным сигналом, называется синфазной. Другая составляющая, сдвинутая по фазе на 90° относительно полезного сигнала, называется квадратурной. Остаточное напряжение является напряжением погрешности, и поэтому желательно его скомпенсировать. Синфазную составляющую остаточного напряжения можно скомпенсировать соответствующим перемещением якоря от среднего положения. Одновременно скомпенсировать и синфазное и квадратурное напряжения погрешности таким способом нельзя. Для подавления квадратурной составляющей могут быть использованы фазочувствительные выпрямители, обладающие свойством не пропускать сигналы, сдвинутые по фазе на 90° относительно опорного напряжения.
Реверсивные индуктивные датчики с сердечниками Ш- и П-образной формы используются для измерения довольно малых перемещений; они имеют начальный зазор порядка 0,3—1 мм.
Для измерения больших перемещений применяют индуктивные датчики в виде катушки с подвижным внутренним сердечником. Если сердечник полностью введен внутри катушки, на которую намотана обмотка, то ее индуктивное сопротивление максимально, а ток в обмотке имеет минимальное значение. При выводе сердечника из катушки индуктивное сопротивление уменьшается, а ток соответственно увеличивается. Индуктивные датчики в виде катушки с перемещающимся внутри нее сердечником получили название плунжерных датчиков. Их также называют индуктивными датчиками с разомкнутым магнитопроводом, поскольку даже при максимальной индуктивности обмотки основной путь магнитного потока проходит по воздуху. С этой точки зрения рассмотренные выше датчики с обмоткой на неподвижном сердечнике и с перемещающимся якорем называют индуктивными датчиками с замкнутым магнитопроводом.
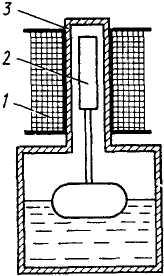 Рис.
6. Индуктивный датчик плунжерного типа
Рис.
6. Индуктивный датчик плунжерного типа
У плунжерных датчиков есть одна очень важная особенность: они позволяют получить информацию о перемещении из замкнутого, изолированного пространства. Пусть, например, надо измерить уровень какой-либо очень вредной жидкости, пары которой ядовиты, да еще находятся под большим давлением. Тогда катушку 1 плунжерного датчика (рис. 6) надевают на разделительную трубку 3 из нержавеющей немагнитной стали, внутри которой и перемещается сердечник 2 из ферромагнитного материала. Перемещение сердечника изменяет индуктивность катушки, а разделительная трубка не экранирует магнитное поле, поскольку материал трубки имеет очень малую магнитную проницаемость. Таким образом, обмотка датчика, все другие электрические элементы измерительной схемы размещены в обычных, нормальных условиях. В связи с этим про плунжерные датчики говорят, что они позволяют вывести перемещение из замкнутого объема. В этом основное преимущество плунжерных датчиков перед датчиками с замкнутым магнитопроводом. А вот по чувствительности, мощности выходного сигнала плунжерные датчики уступают индуктивным датчикам с замкнутым магнитопроводом.
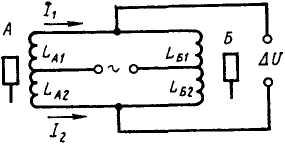 Рис.
7. Индуктивный мост для дистанционной
передачи линейных перемещений
Рис.
7. Индуктивный мост для дистанционной
передачи линейных перемещений
С помощью плунжерных датчиков могут быть реализованы такие же дифференциальные и мостовые схемы, какие были рассмотрены выше (см. рис. 3, 4).
Рассмотрим
в качестве примера использование
плунжерных датчиков в схеме индуктивного
моста (рис. 7). Обмотка каждого из двух
датчиков А и Б имеет
вывод от средней точки. Обмотки датчиков
соединены друг с другом проводами линии
связи. Напряжение питания приложено
между средними точками обмоток. Каждая
из половин обмоток образует плечо моста
переменного тока. Датчик А установлен
в передающем приборе, датчик Б
— в
приемном приборе. При перемещении
сердечника датчика А изменяется
индуктивное сопротивление каждой из
половин его обмотки. Например, при
перемещении сердечника вверх возрастает
индуктивность LA1 и
уменьшается индуктивность LA2. Баланс
моста нарушается, и по проводам линии
связи протекают токи разбаланса I1 и I2.
Эти токи, протекая по обмотке датчика Б, вызывают
электромагнитную силу, перемещающую
сердечник датчика Б. Под
действием этой силы сердечник датчика Б устанавливается
в такое же положение, что и сердечник
датчика А. При
этом, естественно, происходит
соответствующее изменение индуктивностей LБ1 и LБ2.
Условием баланса моста является, как
известно, равенство произведений
сопротивлений противолежащих плеч
моста или соответствующих индуктивностей:  .
.
Схема индуктивного моста позволяет осуществить дистанционную передачу линейных перемещений. Однако усилие на приемной стороне весьма невелико. Например, выпускались приборы с катушками диаметром 65 мм, высотой 135 мм и массой 2,5 кг. При полном ходе в 30 мм обеспечивалось усилие в несколько сантиньютон на 1 % полного хода сердечника. Такого усилия достаточно лишь для перемещения стрелки в приемном приборе.
Для получения значительно больших усилий схема индуктивного моста используется совместно с усилителем и электродвигателем. Напряжение разбаланса моста ΔU снимается с измерительной диагонали моста и подается на вход усилителя, который питает электродвигатель, перемещающий (через редуктор) сердечник датчика Б до тех пор, пока не наступит баланс моста, т. е. ΔU = 0.
studfile.net
Что такое индуктивный датчик? :: SYL.ru
При работе с различными технологиями при желании автоматизировать ряд действий обращаются к различным датчикам. В изделиях из металлов важную роль играет индуктивный датчик. Что он собой представляет и зачем необходим?
Что такое индуктивный датчик?
 Что это и где он нашел применение? Индуктивный датчик — это бесконтактный прибор, который используется, чтобы контролировать положение объектов, сделанных из металлов. К другим материалам он чувствительности не проявляет. Применяются бесконтактные индуктивные датчики, чтобы решать задачи АСУТП. Могут быть использованы с нормально замкнутым или разомкнутым контактом. Принцип действия базируется на редактировании параметров магнитного поля, которое создаётся катушкой индуктивности, что внутри датчика. Но все тонкости настолько многочисленны, что необходимо их обсудить отдельно.
Что это и где он нашел применение? Индуктивный датчик — это бесконтактный прибор, который используется, чтобы контролировать положение объектов, сделанных из металлов. К другим материалам он чувствительности не проявляет. Применяются бесконтактные индуктивные датчики, чтобы решать задачи АСУТП. Могут быть использованы с нормально замкнутым или разомкнутым контактом. Принцип действия базируется на редактировании параметров магнитного поля, которое создаётся катушкой индуктивности, что внутри датчика. Но все тонкости настолько многочисленны, что необходимо их обсудить отдельно.Принцип действия
 Всё базируется на изменении амплитуды колебаний используемого в индуктивном датчике генератора, когда в активную зону вносится предмет определённого размера из металлического, магнитного и ферро-магнитного материала. Так что использование может быть реализовано только с этими типами. Когда подаётся питание на конечный выключатель, расположенный в его области чувствительности, то образуется магнитное поле. Оно наводит в материале вихревые токи, влияние которых меняет амплитуду колебаний генератора. В конечном результате таких преобразований получается аналоговый выходной сигнал. Его величина меняется и зависит от расстояния между контролируемым предметом и датчиком. Триггер Шмитта превращает аналоговый сигнал в логический. Индуктивный датчик перемещения играет важную роль для механизмов, которые отслеживают изменение местоположения металлических деталей. Встретить подобные устройства вы можете в автомобильных конвейерах. Индуктивный датчик положения поможет определить, расположен ли предмет так, как должен. Если ответ отрицательный, то будут предприняты действия, предусмотренные программой, чтобы всё было так, как необходимо для полноценной и правильной работы конвейера.
Всё базируется на изменении амплитуды колебаний используемого в индуктивном датчике генератора, когда в активную зону вносится предмет определённого размера из металлического, магнитного и ферро-магнитного материала. Так что использование может быть реализовано только с этими типами. Когда подаётся питание на конечный выключатель, расположенный в его области чувствительности, то образуется магнитное поле. Оно наводит в материале вихревые токи, влияние которых меняет амплитуду колебаний генератора. В конечном результате таких преобразований получается аналоговый выходной сигнал. Его величина меняется и зависит от расстояния между контролируемым предметом и датчиком. Триггер Шмитта превращает аналоговый сигнал в логический. Индуктивный датчик перемещения играет важную роль для механизмов, которые отслеживают изменение местоположения металлических деталей. Встретить подобные устройства вы можете в автомобильных конвейерах. Индуктивный датчик положения поможет определить, расположен ли предмет так, как должен. Если ответ отрицательный, то будут предприняты действия, предусмотренные программой, чтобы всё было так, как необходимо для полноценной и правильной работы конвейера.Построение индуктивного датчика
 Из чего состоит данный механизм? Бесконтактные индуктивные датчики имеют такие основные узлы:
Из чего состоит данный механизм? Бесконтактные индуктивные датчики имеют такие основные узлы:- Генератор. Создаёт электромагнитное поле, которое необходимо для взаимодействия с объектом.
- Триггер Шмитта. Он обеспечивает гистерезис, когда происходит переключение.
- Усилитель. Занимается увеличением амплитуды сигнала, чтобы он достиг необходимого значения.
- Светодиодный индикатор. Информирует о состоянии выключателя. Также с его помощью обеспечивается контроль работоспособности и указывает на оперативность настройки.
- Компаунд. Необходим для защиты от попадания вовнутрь воды и твердых частиц.
- Корпус. С его помощью обеспечивается монтаж датчика и его защита от различных механических воздействий. Изготавливается из полиамида или латуни и комплектуется крепежными изделиями.
Определения
Когда необходимо использовать индуктивный датчик, следует разбираться и в терминологическом минимуме, который нужен для приятной и комфортной работы. Итак, что следует понимать:
- Активная зона. Это область перед чувствительной поверхностью индуктивного датчика, где наибольшим образом сконцентрировалось магнитное поле. Диаметр данной площади обычно равен размеру самого прибора.
- Номинальное расстояние переключения. Это теоретическая величина расстояния активной зоны, которая не учитывает разброс производственных параметров индуктивного датчика, температурный режим и подаваемое напряжение питания.
- Рабочий зазор. Это расстояние, которое гарантирует надежную работу прибора в определённом диапазоне напряжения и температуры.
- Поправочный коэффициент. Это показатель, который корректирует значение рабочего зазора, в зависимости от вида металла, из которого был создан объект воздействия.
Достоинства
 Почему индуктивные датчики пользуются значительной популярностью? Этому способствует целый ряд параметров, которыми они обладают:
Почему индуктивные датчики пользуются значительной популярностью? Этому способствует целый ряд параметров, которыми они обладают:- Прочность и простота конструкции, а также отсутствие скользящих контактов.
- Индуктивный датчик может быть подключен к источникам промышленной частоты.
- Имеют довольно большую выходную мощность, которая может составлять десятки Ватт.
- Обладают значительной чувствительностью.
Погрешности
 Но при всех плюсах индуктивные датчики имеют и минусы. Самый главный из них – это погрешность. Выделяют такие недостатки:
Но при всех плюсах индуктивные датчики имеют и минусы. Самый главный из них – это погрешность. Выделяют такие недостатки:- Погрешность, которая зависит от нелинейной характеристики. В приборе используется принцип индуктивного преобразования величины, что базируется на работе датчиков, которые имеют свой диапазон, из-за чего и возникает данная проблема.
- Температурная погрешность. Является случайной составляющей. Поскольку работа прибора зависит от температуры используемых датчиков, то погрешность может достигать значительных значений. Поэтому высокую важность имеет среда работы механизма. Работа индуктивного датчика обычно осуществляется при показателе в 25 градусов в хорошо вентилируемом помещении. Значительное изменение температуры в большее или меньшее значение является нежелательным.
- Погрешность из-за влияния других электромагнитных полей. Является случайной составляющей. Возникает из-за того, что на индуктивный датчик действуют внешние электромагнитные поля, которые могут сильно влиять на работу прибора. Чтобы избежать таких случаев, в промышленности электроустановки почти всегда используют частоту в 50 Гц.
Для минимизации вероятности возникновения погрешности необходимо качественно прорабатывать все нюансы.
www.syl.ru