Датчик перемещения как работает
Датчик перемещения — это прибор, предназначенный для определения величины линейного или углового механического перемещения какого-либо объекта. Разумеется, подобные приборы имеют колоссальное количество практических применений в самых разнообразных областях, поэтому существует множество классов датчиков перемещения, которые различаются по принципу действия, точности, цене и прочим параметрам.
По принципу действия датчики перемещения могут быть:
На основе эффекта Холла
Емкостные датчики перемещения
В основе работы датчиков данного типа лежит взаимосвязь ёмкости конденсатора с его геометрической конфигурацией. В простейшем случае речь идёт об изменении расстояния между пластинами вследствие внешнего физического воздействия (Рисунок 1). Поскольку ёмкость конденсатора изменяется обратно пропорционально величине зазора между пластинами, определение ёмкости при прочих известных параметрах позволяет судить о расстоянии между пластинами. Изменение ёмкости можно зафиксировать различными способами (например, измеряя его импеданс), однако в любом случае конденсатор необходимо включить в электрическую цепь.
Рисунок 1. Емкостной датчик линейного перемещения с изменяющейся величиной зазора
Другой схемой, где выходным параметром является электрическая ёмкость, является схема, содержащая конденсатор с подвижным диэлектриком (Рисунок 2). Перемещение диэлектрической пластины между обкладками конденсатора также приводит к изменению его ёмкости. Пластина может быть механически связана с интересующим объектом, и в этом случае изменение ёмкости свидетельствует о перемещении объекта. Кроме того, если сам объект обладает свойствами диэлектрика и имеет подходящие габариты — он может быть использован непосредственно в качестве диэлектрической среды в конденсаторе.
Рисунок 2. Емкостной датчик линейного перемещения с подвижным диэлектриком
Оптические датчики перемещения
Существует множество вариаций схем датчиков перемещения, основанных на различных оптических эффектах. Пожалуй, наиболее популярной является схема оптической триангуляции — датчик положения является, по сути, дальномером, который определяет расстояние до интересующего объекта, фиксируя рассеянное поверхностью объекта излучение и определяя угол отражения, что даёт возможность определить длину d — расстояние до объекта (Рисунок 3). Важным достоинством большинства оптических датчиков является возможность производить бесконтактные измерения, кроме того такие датчики обычно довольно точны и имеют высокое быстродействие.
датчик сигнальный измерительный
Рисунок 3. Оптический датчик перемещения на основе схему оптической триангуляции
В другой реализации оптического датчика, предназначенной для регистрации и определения параметров малых перемещений и вибраций, используется двойная решётчатая конструкция, а также источник света и фотодетектор (Рисунок 4). Одна решётка неподвижна, вторая подвижна и может быть механически закреплена на интересующем объекте или каким-либо способом передавать датчику его движение. Малое смещение подвижной решётки приводит к изменению интенсивности света, регистрируемой фотодетектором, причём с уменьшением периода решётки точность датчика возрастает, однако сужается его динамический диапазон.
Рисунок 4. Оптический датчик перемещения на основе дифракционных решеток
Дополнительными возможностями применения обладают оптические датчики, учитывающие поляризацию света. В таких датчиках может быть реализован алгоритм селекции объектов по отражательным свойствам поверхности, т.е. датчик может «обращать внимание» только на объекты с хорошей отражающей способностью, прочие объекты игнорируются. Разумеется, чувствительность к поляризации негативно сказывается на стоимости подобных устройств.
Индуктивные датчики перемещения
В одной из конфигураций датчика данного типа чувствительным элементом является трансформатор с подвижным сердечником. Перемещение внешнего объекта приводит к перемещению сердечника, что вызывает изменение потокосцепления между первичной и вторичной обмотками трансформатора (Рисунок 5). Поскольку амплитуда сигнала во вторичной обмотке зависит от потокосцепления, по величине амплитуды вторичной обмотки можно судить о положении сердечника, а значит и о положении внешнего объекта.
Рисунок 5. Индуктивный датчик перемещения на трансформаторе
Другая конфигурация имеет более простую схему, однако она пригодна лишь для небольшого количества приложений, где требуется определять незначительные перемещения или вибрации объектов, состоящих из ферромагнитного материала. В данной схеме интересующий ферромагнитный объект играет роль магнитопровода, положение которого влияет на индуктивность измерительной катушки (Рисунок 6).
Рисунок 6. Индуктивный датчик перемещения для объектов из ферромагнитных материалов
Ультразвуковые датчики перемещения
В ультразвуковых датчиках реализован принцип радара — фиксируются отражённые от объекта ультразвуковые волны, поэтому структурная схема обычно представлена источником ультразвуковых волн и регистратором (Рисунок 8), которые обычно заключены в компактный корпус. Определение временной задержки между моментами отправки и приёма ультразвукового импульса позволяет измерять расстояние до объекта с точностью, доходящей до десятых долей миллиметра. Наряду с оптическими, ультразвуковые датчики на сегодняшний день являются, пожалуй, наиболее универсальным и технологичным бесконтактным средством измерения. Использование этого принципа измерений опять же можно найти в детекторах обнаружения дефектов, только на этот раз уже в ультразвуковых дефектоскопах.
Рисунок 8. Ультразвуковой датчик перемещения
Датчики на основе эффекта Холла
Датчики этого типа имеют конструкцию подобную конструкции магниторезистивных датчиков, однако в основу их работы положен эффект Холла — прохождение тока через проводник, на который воздействует внешнее магнитное поле, приводит к возникновению разности потенциалов в поперечном сечении проводника.
Магниторезистивные датчики перемещения
В магниторезистивных датчиках перемещения используется зависимость электрического сопротивления магниторезистивных пластинок от направления и величины индукции внешнего магнитного поля. Датчик, как правило, состоит из постоянного магнита и электрической схемы, содержащей включённые по мостовой схеме магниторезистивные пластинки и источник постоянного напряжения (Рисунок 9). Интересующий объект, состоящий из ферромагнитного материала, перемещаясь в магнитном поле, изменяет его конфигурацию, вследствие чего изменяется сопротивление пластинок, и мостовая схема регистрирует рассогласование, по величине которого можно судить о положении объекта.
Рисунок 9. Магниторезистивный датчики перемещения
Предлагаем Вам ознакомиться с физическими основами работы индуктивных датчиков перемещения производства компании RDP Electronics Ltd (United Kingdom), с их основными параметрами, преимуществами и сферами применения.
Сам термин LVDT (Linear Variable Differential Transformer) — означает линейный дифференциальный трансформатор с переменным коэффициентом передачи.
Рассмотрим принцип работы датчиков на LVDT технологии.
Первичная возбуждающая обмотка
Вторичная обмотка 1
Вторичная обмотка 2
Результирующий сигнал от суммы вторичных обмоток
В принципе имеется две схемы работы — с выходным напряжением и выходным током.
Схема работы с выходным током (4-20мА) | Схема работы с выходным напряжением |
Рассмотрим более детально сам процесс измерения перемещения.
Датчик перемещения, работающий по технологии LVDT, состоит из трех обмоток трансформатора — одной первичной и двух вторичных. Степень передачи тока между первичной и двумя вторичными обмотками определяется положением подвижного магнитного сердечника, штока. Вторичные обмотки трансформатора соединены в противофазе.
При нахождении штока в середине трансформатора, напряжение на двух вторичных обмотках равны по амплитуде, а т. к. они соединены противофазно, суммарное напряжение на выходе равно нулю — перемещения нет.
Если шток перемещается от серединного положения в какую либо сторону — происходит увеличение напряжения в одной из вторичных обмоток и уменьшение в другой. В результате суммарное напряжение будет не нулевым — датчик будет фиксировать смещение штока.
Соотношение выходной фазы сигнала по сравнению с фазой возбуждающего сигнала дает возможность электронике понять, в какой части обмотки находится в данный момент шток.
Основная особенность принципа работы индуктивных датчиков перемещения состоит в том, что прямой электрический контакт между чувствительным элементом и трансформатором отсутствует (связь осуществляется через магнитное поле), что дает пользователям абсолютные данные по перемещению, теоретически бесконечную точность разрешения и очень долгий срок службы датчика.
Особенности схемы работы с выходным током — т. к. цепь генератор/демодулятор встроена в сам датчик перемещения и питается от выходного тока 4-20 мА, то нет необходимости во внешнем оборудовании для формирования сигнала.
Особенности схемы работы с выходным напряжением — цепь генератор/демодулятор, встроенная в датчик перемещения обеспечивает возбуждение и преобразует сигнал обратной связи в напряжение постоянного тока. При этом так же не требуется внешнее оборудование для формирования сигнала.
Особенности измерения выходного сигнала.
1) Если выходное напряжение измеряется не фазочувствительным (среднеквадратичным) вольтметром, то отклонение штока в любую сторону от центрального положения в трансформаторе датчика будет соответствовать увеличению выходного напряжения.
Заметим, что кривая не касается горизонтальной оси. Это происходит из-за остаточного выходного напряжения.
2) Если используется фазочувствительная демодуляция, то по выходному сигналу можно судить, в какой части трансформатора находится шток в данный момент.
Для формирования сигнала всегда используется фазочувствительная демодуляция, т.к. это исключает влияние на выходной сигнал остаточного выходного напряжения и позволяет пользователю знать положение штока в трансформаторе.
Диапазон линейности индуктивного датчика перемещения.
Если мы рассмотрим выходную кривую вне механического диапазона типичного LVDT датчика, то можно заметить, что на краях диапазона кривая изгибается. Это значит, что механический диапазон существенно шире линейного участка работы.
При калибровке датчика, важно, что электрическая нулевая точка используется в качестве ссылки, и что датчик используется в пределах ± FS (полного диапазона) вокруг электрического нулевом положения.
Если проводить калибровку не беря за основу точку ноля вольт, одно из положений полного диапазона будет за пределами линейного диапазона и, следовательно, может привести к ошибке линейности.
Типы индуктивных датчиков перемещения
Тип 1 — несвязанные преобразователи, которые имеют якорь, который отделен от тела корпуса. Части датчика должны быть установлены таким образом, что якорь не прикасался к внутренней трубке корпуса. Сделав это, можно получить абсолютное отсутствие трения при движении чувствительного элемента датчика.
Тип 2 — монолитные преобразователи, которые имеют тефлоновый подшипник, который направляет якорь (шток) по внутренней трубке.
Тип 3 — монолитные преобразователи с возвратной пружиной, которая толкает якорь (шток) наружу.
Внутреннее строение типичного индуктивного датчика перемещения LVDT
Преимущества индуктивных датчиков перемещения LVDT
1. Преимущества над линейными потенциометрами (POTS).
- Не имеют контакта корпуса и внутренних деталей с чувствительным элементом, что означает, что нет никакого износа при движении штока. POTS датчики имеют контакт с чувствительным элементом и могут быстро изнашиваются, особенно под воздействием вибрации.
- Можно легко обеспечить защиту от влаги и пыли на требуемом уровне, даже стандартные версии LVDT датчиков обычно имеют гораздо лучший уровень защиты от внешний воздействий, чем POTS.
- Вибрация не вызывает влияния на пропадание сигнала, в отличие от POTS, где скользящий бегунок может прервать контакт с проводником при вибрации.
2. Преимущества над магнитострикционными датчиками.
- Не восприимчивы к ударам и вибрации.
- Менее восприимчивы к паразитным магнитным полям окружающей среды.
- Система формирования сигнала может быть удалена от чувствительного элемента на некоторое расстояние, что позволяет использовать датчики при работе с высокой температурой и высоким уровнем радиации.
- Магнитострикционные датчики не имеют короткого штока ±100мм или менее, а это как раз наиболее востребованный диапазон технического применения датчиков перемещения.
3. Преимущества над кодерами (датчиками положения).
- Имеют лучший аналоговый частотный отклик.
- Имеют более прочный корпус.
- Сразу после включения «знают» положение штока, в отличии от кодеров, которым надо указывать постоянную ссылку на известное положение.
4. Преимущества над переменными векторными резистивными преобразователями (VRVT)
- LVDT датчики как правило более дешевы.
- Имеют меньший диаметр корпуса.
- Более прочные и не изнашиваются.
- Могут использоваться значительно дольше.
5. Преимущества над линейными емкостными датчиками
- LVDT датчики как правило более дешевы.
- Менее восприимчивы к внешним условиям эксплуатации.
- Значительно более прочные.
Особенности индуктивных датчиков перемещения LVDT
- Максимальная рабочая температура 600°C.
- Минимальная рабочая температура –220°C (для справки, температура жидкого азота -196°C, температура жидкого гелия -269°С).
- Могут работать при уровне радиации 100,000 рад.
- Могут работать при давлении 200Бар.
- Могут работать под водой, при этом вода может попадать внутрь датчика не причиняя ему вреда. Существует специальная серия подводных датчиков, которые могут без тех. осмотра работать под водов в течении 10-ти лет, работать под водой на глубине до 2,2км. Кабельные разъемы могут подсоединяться так же под водой.
Основные сферы применения LVDT датчиков
Промышленные измерительные системы
- Регулирующие вентили — везде, где существуют регулирующие вентили индуктивные датчики перемещения могут быть использованы для контроля положения штока вентиля. Особенно, где есть ответственные участки работы, например, в клапанах пара для турбин на электростанциях.
- Контроль положения шлюзов — погружные датчики перемещения подходят для измерения положения шлюзов в водохозяйственных и канализационных системах.
- Измерение зазора между валками.
Для поддержания равномерной толщины проката зазор между валками часто измеряется на обоих концах. - Контроль перемещения штоков вентилей на подводных нефте/газо проводах.
- Контроль работы гидравлических активаторов — измерение перемещения объекта, который передвигает активатор. Благодаря очен высокой износостойкости, данные LVDT датчики перемещения могут выдерживать миллионы циклов перемещения.
- Контроль положения/перемещения режущих инструментов, отрезающих рулонные материалы.
- Измеряет положение/смещение роликов, которые используется для выпрямления полосового проката перед штамповкой.
- Могут быть использованы для динамического измерения размеров (диаметров) рулонов продукта, например, инициировать сигнал к системе управления, когда рулон достигает максимального/минимального размера при наматывании/сматывании материала.
Станки
- Могут быть использованы в испытательных приспособлениях для измерения круглости, плоскостности и т.д. частей машин для анализа качества их изготовления.
- Могут быть использованы для оценки и контроля взаимного расположения компонентов деталей в сборке, когда требуется юстировка/подгонка размеров взаимного расположения деталей.
Авиация/космонавтика
- Могут быть использованы для оценки реакции привода на действие активатора. Например, преобразователь измеряет положение отклонения закрылков крыла самолета при техническом обслуживании. Тут очень важно измерить скорость срабатывания активатора после подачи на него управляющего сигнала, а так же скорость изменения положения закрылков.
- Анализ Ротора вертолета
Датчики LVDT используются на вертолетах, чтобы измерить угол наклона лопастей ротора. - Могут быть использованы для оценки смещения корпуса двигателя при нагревании.
- Могут быть использованы для измерения смещения (деформации) лопасти турбины при внешнем воздействии.
- Могут быть использованы для измерения отклонения диафрагмы сопла реактивного двигателя.
- Могут быть использованы для испытания крыльев самолетов для измерения их отклонения при нагрузке.
Строительство / Проектирование зданий и сооружений
- Могут быть использованы для измерения вибрации или деформации мостов при изменении трафика движения или порывов ветра.
- Могут быть использованы для измерения смещения грунта при строительстве, контроля оползней и насыпных дамб.
- Могут быть использованы при испытании крупногабаритных строительных конструкций, балок, пролетов моста и т. д. на силовую деформацию.
Автомобилестроение
- Могут быть использованы для контроля смещения корпуса двигателя при его испытаниях.
- Идеальным применением LVDT датчиков может быть тестирование компонентов подвески автотранспорта.
- Могут быть использованы для контроля изготовления прецизионных компонентов.
- Могут быть использованы для настройки компонентов двигателя, таких как дизельные форсунки.
- Могут быть использованы для тестирования сидений, дверей, педалей и ручек транспортных средств для моделирования продления их срока службы.
- Могут быть использованы для измерения профиля поверхности заготовки, например стекла или других площадных объектов.
Выработка энергии
- Могут быть использованы для измерения биения вала турбины.
- Могут быть использованы для контроля положения главного парового клапана, который регулирует поток пара в турбину. Клапан постоянно корректирует свое положения для поддержания постоянной скорости вращения турбины. LVDT датчики идеально подходят для работы в зоне высоких температур, грязи и постоянной вибрации.
- Могут быть использованы для контроля положения перепускного клапана. Когда откроется перепускной клапан, датчик может испытать температуру 200°C.
Конструкция датчиков перемещения может быть очень разнообразном. Каждый тип имеет свои преимущества и недостатки, в этой статье вы узнаете принцип действия всех существующих на сегодняшний день датчиков перемещения.
Вы также можете посмотреть другие статьи. Например, «Виды деформации твердых тел» или «Датчики деформации (экстензометры)».
Датчик перемещения — это прибор, предназначенный для определения величины линейного или углового механического перемещения какого-либо объекта. Разумеется, подобные приборы имеют колоссальное количество практических применений в самых разнообразных областях, поэтому существует множество классов датчиков перемещения, которые различаются по принципу действия, точности, цене и прочим параметрам. Следует сразу отметить, что все датчики перемещения можно разделить на две основных категории — датчики линейного перемещения и датчики углового перемещения (энкодеры). В рамках данного обзора основное внимание будет уделено именно датчикам линейного перемещения.
По принципу действия датчики перемещения могут быть:
- Емкостными
- Оптическими
- Индуктивными
- Вихретоковыми
- Ультразвуковыми
- Магниторезистивными
- Потенциометрическими
- Магнитострикционными
- На основе эффекта Холла
Емкостные датчики перемещения
В основе работы датчиков данного типа лежит взаимосвязь ёмкости конденсатора с его геометрической конфигурацией. В простейшем случае речь идёт об изменении расстояния между пластинами вследствие внешнего физического воздействия (Рисунок 1). Поскольку ёмкость конденсатора изменяется обратно пропорционально величине зазора между пластинами, определение ёмкости при прочих известных параметрах позволяет судить о расстоянии между пластинами. Изменение ёмкости можно зафиксировать различными способами (например, измеряя его импеданс), однако в любом случае конденсатор необходимо включить в электрическую цепь.
Рисунок 1. Емкостной датчик линейного перемещения с изменяющейся величиной зазора.
Другой схемой, где выходным параметром является электрическая ёмкость, является схема, содержащая конденсатор с подвижным диэлектриком (Рисунок 2). Перемещение диэлектрической пластины между обкладками конденсатора также приводит к изменению его ёмкости. Пластина может быть механически связана с интересующим объектом, и в этом случае изменение ёмкости свидетельствует о перемещении объекта. Кроме того, если сам объект обладает свойствами диэлектрика и имеет подходящие габариты — он может быть использован непосредственно в качестве диэлектрической среды в конденсаторе.
Рисунок 2. Емкостной датчик линейного перемещения с подвижным диэлектриком.
Оптические датчики перемещения
Существует множество вариаций схем датчиков перемещения, основанных на различных оптических эффектах. Пожалуй, наиболее популярной является схема оптической триангуляции — датчик положения является, по сути, дальномером, который определяет расстояние до интересующего объекта, фиксируя рассеянное поверхностью объекта излучение и определяя угол отражения, что даёт возможность определить длину d — расстояние до объекта (Рисунок 3). Важным достоинством большинства оптических датчиков является возможность производить бесконтактные измерения, кроме того такие датчики обычно довольно точны и имеют высокое быстродействие.
Рисунок 3. Оптический датчик перемещения на основе схему оптической триангуляции.
В другой реализации оптического датчика, предназначенной для регистрации и определения параметров малых перемещений и вибраций, используется двойная решётчатая конструкция, а также источник света и фотодетектор (Рисунок 4). Одна решётка неподвижна, вторая подвижна и может быть механически закреплена на интересующем объекте или каким-либо способом передавать датчику его движение. Малое смещение подвижной решётки приводит к изменению интенсивности света, регистрируемой фотодетектором, причём с уменьшением периода решётки точность датчика возрастает, однако сужается его динамический диапазон.
Рисунок 4. Оптический датчик перемещения на основе дифракционных решеток.
Дополнительными возможностями применения обладают оптические датчики, учитывающие поляризацию света. В таких датчиках может быть реализован алгоритм селекции объектов по отражательным свойствам поверхности, т.е. датчик может «обращать внимание» только на объекты с хорошей отражающей способностью, прочие объекты игнорируются. Разумеется, чувствительность к поляризации негативно сказывается на стоимости подобных устройств.
Индуктивные датчики перемещения
В одной из конфигураций датчика данного типа чувствительным элементом является трансформатор с подвижным сердечником. Перемещение внешнего объекта приводит к перемещению сердечника, что вызывает изменение потокосцепления между первичной и вторичной обмотками трансформатора (Рисунок 5). Поскольку амплитуда сигнала во вторичной обмотке зависит от потокосцепления, по величине амплитуды вторичной обмотки можно судить о положении сердечника, а значит и о положении внешнего объекта.
Рисунок 5. Индуктивный датчик перемещения на трансформаторе.
Другая конфигурация имеет более простую схему, однако она пригодна лишь для небольшого количества приложений, где требуется определять незначительные перемещения или вибрации объектов, состоящих из ферромагнитного материала. В данной схеме интересующий ферромагнитный объект играет роль магнитопровода, положение которого влияет на индуктивность измерительной катушки (Рисунок 6).
Рисунок 6. Индуктивный датчик перемещения для объектов из ферромагнитных материалов.
Вихретоковые датчики перемещения
Датчики данного типа содержат генератор магнитного поля и регистратор, с помощью которого определяется величина индукции вторичных магнитных полей. Вблизи интересующего объекта генератор создаёт магнитное поле, которое, пронизывая материал объекта, порождает в его объёме вихревые токи (токи Фуко), которые, в свою очередь, создают вторичное магнитное поле (Рисунок 7). Параметры вторичного поля определяются регистратором, и на их основании вычисляется расстояние до объекта, так как чем объект ближе, тем больший магнитный поток будет пронизывать его объём, что усилит вихревые токи и индукцию вторичного магнитного поля. Подобный принцип используется и в вихретоковых дефектоскопах, однако там на параметры вторичного магнитного поля влияет не расстояние до объекта, а наличие в его внутренней структуре скрытых несовершенств. Метод является бесконтактным, однако может применяться только для металлических тел.
Рисунок 7. Вихретоковый датчик перемещения.
Ультразвуковые датчики перемещения
В ультразвуковых датчиках реализован принцип радара – фиксируются отражённые от объекта ультразвуковые волны, поэтому структурная схема обычно представлена источником ультразвуковых волн и регистратором (Рисунок 8), которые обычно заключены в компактный корпус. Определение временной задержки между моментами отправки и приёма ультразвукового импульса позволяет измерять расстояние до объекта с точностью, доходящей до десятых долей миллиметра. Наряду с оптическими, ультразвуковые датчики на сегодняшний день являются, пожалуй, наиболее универсальным и технологичным бесконтактным средством измерения. Использование этого принципа измерений опять же можно найти в детекторах обнаружения дефектов, только на этот раз уже в ультрозвуковых дефектоскопах.
Рисунок 8. Ультразвуковой датчик перемещения.
Магниторезистивные датчики перемещения
В магниторезистивных датчиках перемещения используется зависимость электрического сопротивления магниторезистивных пластинок от направления и величины индукции внешнего магнитного поля. Датчик, как правило, состоит из постоянного магнита и электрической схемы, содержащей включённые по мостовой схеме магниторезистивные пластинки и источник постоянного напряжения (Рисунок 9). Интересующий объект, состоящий из ферромагнитного материала, перемещаясь в магнитном поле, изменяет его конфигурацию, вследствие чего изменяется сопротивление пластинок, и мостовая схема регистрирует рассогласование, по величине которого можно судить о положении объекта.
Рисунок 9. Магниторезистивный датчики перемещения.
Датчики на основе эффекта Холла
Датчики этого типа имеют конструкцию подобную конструкции магниторезистивных датчиков, однако в основу их работы положен эффект Холла — прохождение тока через проводник, на который воздействует внешнее магнитное поле, приводит к возникновению разности потенциалов в поперечном сечении проводника.
Магнитострикционные датчики перемещения
Как правило, магнитострикционный датчик представляет собой протяжённый канал — волновод, вдоль которого может свободно перемещаться постоянный кольцевой магнит. Внутри волновода содержится проводник, способный при подаче на него электрических импульсов создавать магнитное поле вдоль всей своей длины (Рисунок 10). Полученное магнитное поле складывается с полем постоянного магнита, и результирующее поле создаёт момент вращения канала, содержащего волновод (эффект Вайдемана). Импульсы вращения распространяются по каналу в обе стороны со скоростью звука материала канала. Регистрация временной задержки между отправкой электрического импульса и приёма импульса вращения позволяет определить расстояние до постоянного магнита, т.е. определить его положение. Канал может иметь довольно большую длину (до нескольких метров), а положение магнита может быть определено с точностью до нескольких микрометров. Магнитострикционные датчики обладают отличной повторяемостью, разрешением, устойчивостью к неблагоприятным условиям и низкой чувствительностью к температурным изменениям.
Рисунок 10. Магнитострикционный датчик перемещения.
Потенциометрические датчики перемещения
Датчик данного типа в своей основе имеет электрический контур, содержащий потенциометр (Рисунок 11). Линейное перемещение объекта приводит к изменению сопротивления потенциометра (переменного резистора). Если через потенциометр пропускать постоянный ток, то падение напряжения на нём будет пропорционально величине сопротивления, и, следовательно, величине линейного перемещения интересующего объекта.
Рисунок 11. Потенциометрический датчик перемещения.
Наряду с механическими датчиками перемещения, потенциометрические датчики получили наиболее широкое распространение в силу своей простоты и низкой стоимости, однако для универсальных, прецизионных и бесконтактных измерений в последнее время всё чаще используются датчики на основе оптических эффектов.
Если вам понравилась статья нажмите на одну из кнопок ниже
ravon-r2.ru
4.2 Двухтактный индуктивный датчик перемещения
Двухтактный индуктивный датчик можно построить на основе рассмотренного однотактного датчика. Для этого надо взять два идентичных однотактных датчика и включить их диференциально как по отношению к измеряемому перемещению, так и к выходному сигналу. Схема включения двух однотактных датчиков для образования двухтактного датчика показана на рис. 44.
В схеме присутствуют два контурных тока J1 и J2.,величина которых зависит от индуктивностей обмоток L1 и L2. Поскольку контуры питаются от дифференциальных вторичных обмоток трансформатора Тр, токи в контурах всегда
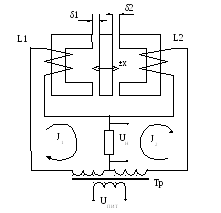
Рис. 44
Дифференциальная схема включения индуктивного датчика.
направлены встречно (в противофазе) и результирующий ток в нагрузке равен их разности.
JH=J1—J2 (29)
Величина каждого из контурных токов зависит от индуктивности соответствующего однотактного датчика как рассмотрено выше (27). Воздушный зазор в магнитных цепях определяется начальным зазором δ0 и смещением якоря x (рис. 44)
δ1= δ0+x
δ2 = δ0 – x (30)
Подставляя (27) в (29) с учетом (30), получим
 (31)
(31)
где U0 – напряжение на вторичной обмотке трансформатора.
Графически построение статической характеристики двухтактного индуктивного датчика показано на рис. 45.
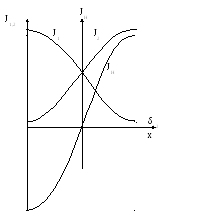
Рис. 45
Статическая характеристика двухтактного индуктивного датчика.
Статическая
характеристика имеет практически
линейный участок при малых значениях x,
но к краям диапазона перемещения (±δ0)
существенно отклоняется от линейной
зависимости. Поэтому в зависимости от
требуемой точности приходится ограничивать
величину рабочего перемещения якоря.
Считается, что для обеспечения точности
преобразования в пределах (1÷2)% рабочий
диапазон перемещения  .
.
Более точно вид статической характеристики и, соответственно, величина погрешности может быть получена на этапе проверочных расчетов за счет более подробного учета изменения магнитного сопротивления при перемещении якоря или экспериментально при исследовании макетного образца датчика.
Индуктивный датчик может использоваться и в других схемах включения. Так в схеме, показанной на рис 44 можно поменять местами подключение напряжения питания и нагрузочного сопротивления. В этом случае токи J1 и J2 будут синфазными, но ЭДС в выходной обмотке, наводимые этими токами будут в противофазе, что обеспечит формирование двухтактной статической характеристики датчика такой же, как на рис 45.
Другим способом включения двух дифференциально изменяющихся индуктивностей L1 и L2 является мостовая схема (рис.46). В нее кроме индуктивностей включены два постоянных резистора с одинаковым сопротивлением R. К одной из диагоналей моста приложено напряжение питания U0, а с другой диагонали снимается выходной сигнал UH.
В исходном состоянии (при среднем положении якоря) индуктивности L1 и L2 равны между собой, следовательно, равны их реактивные и полные сопротивления и мост сбалансирован. Напряжение на выходе моста равно нулю. При смещении якоря на величину x произойдет разбаланс моста и на выходе появится напряжение, соответствующее величине перемещения. Фаза выходного напряжения будет определяться направлением смещения, т.е. статическая характеристика будет двухтактная, аналогичная показанной на рис.45.
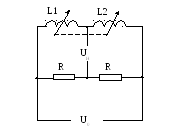
Рис.46
Мостовая схема включения обмоток индуктивного датчика.
При разомкнутой цепи нагрузки (RH→∞) напряжение в выходной диагонали моста (UH) (с учетом допущения 5) будет равно
 (32)
(32)
Используя соотношение (26), получим
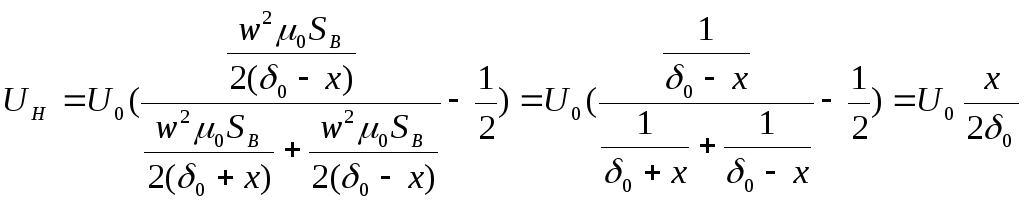 (33)
(33)
Более точное выражение для статической характеристики можно получить, учитывая активное сопротивление обмоток RD , используя более точный математический аппарат для расчета магнитного сопротивления датчика и влияние сопротивления нагрузки RH, включенной в выходную диагональ моста. При этом статическая характеристика станет нелинейной, но сохранит при малых x линейный участок. Наиболее достоверная статическая характеристика может быть получена при экспериментальном исследовании макета спроектированного датчика.
Индуктивные датчики обладают большой конструктивной гибкостью. На рис.47 показан датчик угловых перемещений, полученный из рассмотренного (рис.44) датчика линейных перемещений. При угловых перемещениях якоря вокруг оси изменяются воздушные зазоры и, соответственно, индуктивности правой и левой обмотки. Датчик может быть включен в схемы, показанные на рис 44, 46, и будет иметь двухтактную статическую характеристику, подобную показанной на рис.45. Поскольку в соответствии с допущением 3 толщина зазора должна быть достаточно малой по сравнению со сторонами «а» (рис.41), диапазон измеряемых углов может составлять единицы или доли градуса. Следует отметить, что рабочий воздушный зазор в рассматриваемом датчике в общем случае не является плоским. Для предварительного расчета можно применить формулу (24), используя в ней среднее значение величины зазора. Более точно магнитное сопротивление клиновидного зазора можно подсчитать по формулам, приводимым в специальной литературе /////.
Рис. 47.
Двухтактный индуктивный датчик угловых перемещений.
Действие индуктивного датчика основано на изменении реактивного сопротивления обмотки, которое в свою очередь зависит от изменения магнитного сопротивления при перемещении подвижной части датчика. На величину магнитного сопротивления можно влиять не только изменением величины воздушного зазора δ, но и изменением площади зазора SB (24). Это дает возможность создания других конструктивных схем индуктивных датчиков, одна из которых показана на рис.48.
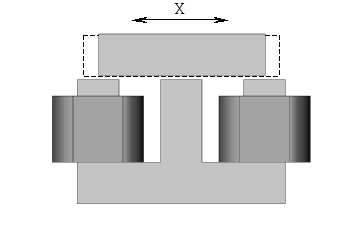
Рис. 48.
Двухтактный индуктивный датчик линейных перемещений.
Магнитное сопротивление левого и правого зазоров в условиях допущений 1-6 описываются формулами
 ,
,  , (34)
, (34)
Магнитные потоки левого и правого зазоров преодолевают еще средний воздушный зазор с магнитным сопротивлением
 . (35)
. (35)
Соответственно индуктивности левой и правой обмоток
 ,
,  . (36)
. (36)
При включении этих обмоток в схему, показанную на рис.44 или на рис.46 получаем двухтактный индуктивный датчик с перемещением якоря поперек силовых линий магнитного поля, обеспечивающего перемещение значительно больше по величине, чем рассмотренные выше датчики (рис.38 или рис.44) с перемещением якоря вдоль силовых линий.
Существенным недостатком индуктивного датчика является наличие большого «обратного воздействия» — электромагнитного усилия притяжения якоря к сердечнику. Это усилие действует на устройство, перемещение подвижной части которого должен измерять датчик. В некоторых случаях, например в гироприборах, такое воздействие может вредно влиять на работу прибора. Для снижения обратного воздействия можно использовать симметричную схему магнитной системы индуктивного датчика, представленную на рис. 49. В этой схеме используются четыре обмотки с попарно дифференциальным изменением индуктивности. Эти четыре обмотки можно включить последовательно по две в известные дифференциальные схемы (рис.44 или рис.46), а можно составить из них мостовую схему (рис.46 с заменой резисторов R на сопротивление двух дополнительных обмоток), которая дает практически вдвое больший коэффициент передачи (чувствительность) датчика.
Рис. 49.
Сбалансированный двухтактный индуктивный датчик линейных перемещений.
Магнитные системы индуктивных датчиков с перемещением якоря поперек силовых линий можно приспособить для измерения угловых перемещений, придав якорю форму цилиндрического сектора (рис.50а и 50б).
а б
Рис. 50.
Двухтактный индуктивный датчик угловых перемещений
Изменение магнитного сопротивления воздушного зазора индуктивного датчика можно реализовать за счет введения в воздушный зазор пластины из проводящего немагнитного материала. Поскольку в индуктивном датчике возбуждается переменное магнитное поле, в проводящей пластине возбуждаются вихревые токи (токи Фуко), создающие собственное магнитное поле, направление которого противоположно возбуждающему магнитному полю. В результате в области воздушного зазора, занятой проводящей пластиной результирующее магнитное поле существенно ослабляется, т.е. проводящая пластина экранирует переменное магнитное поле в части воздушного зазора. Это приводит к изменению рабочей площади и магнитного сопротивления этого зазора и, соответственно, к изменению индуктивности обмотки. Дополнительный эффект от введения проводящей пластины в воздушный зазор вызывается увеличением активных потерь в магнитной цепи за счет энергии, рассеиваемой токами Фуко в пластине. Это приводит к увеличению результирующего активного сопротивления обмотки датчика.
studfile.net
описание, виды, применение и как сделать своими руками
Контроллеры – устройства, позволяющие сделать жизнь людей проще. Есть контроллеры света, датчики звука, а есть регистраторы перемещения. Последние определяют величину изменения координат чего-либо. Разумеется, они применяются во всех сферах человеческой жизни. Далее будет рассмотрен датчик для контроля линейного перемещения объектов: его разновидности, характеристики, а также применение устройства.
Описание и назначение прибора
В общем виде подобные контроллеры состоят из элементарного электронного устройства (конденсатора, катушки, резистора, их комбинаций с дополнениями), механического объекта, изменяющего параметры этих устройств (феррита или пластины диэлектрика), а также АЦП для обработки сигнала аналогового формата и передачи его на управляющий элемент (микроконтроллер, например).

Виды и принцип действия
Контроллеры движения различаются по физическим явлениям, которые лежат в их основе, и, соответственно, по способу функционирования.
Емкостные
Работа таких регистраторов основана на варьировании емкости конденсатора.
Из школьного курса физики известно, что емкость проще изменить, уменьшая или увеличивая расстояние между его обкладками, либо внесением диэлектрика между его пластинами.
Исходя из этого получается, что емкостные контроллеры бывают двух видов (в зависимости от способа изменения емкости накопителя).
В первом случае чем ближе измеряемая цель, движение которого фиксирует датчик, тем меньше зазор между обкладками, тем больше его емкость. И наоборот.
При использовании емкостного контроллера второй конфигурации движение фиксируется при помощи пластины, связанной с измеряемой целью. Чем цель ближе, тем больше пластина проникает между пластинами.
Фиксировать величину емкости можно разными способами. Например, измерять комплексное сопротивление конденсатора.

Оптические
Эффектов из раздела оптики, на которых можно построить датчик движения, много. Самый популярный и чаще используемый – эффект оптической триангуляции. Контроллеры на его основе определяют расстояние от движущейся цели с помощью фиксации рассеянного о поверхность перемещающегося объекта излучения и определения угла отражения с помощью фотодетектора.
Такие контроллеры производят измерение расстояния, никак не контактируя с выбранной целью. Они высокоточные и быстро реагируют на изменение измеряемых параметров.
Другой вид оптических контроллеров основан на учете вибрации и малых перемещений. Такие регистраторы состоят из трубы, двух решеток внутри – одна зафиксирована на месте, а вторая подвижная и может быть связана с движущимся объектом – и фотодетектора.
При появлении движения со стороны цели подвижная решетка изменяет свое положение, что влияет на интенсивность света, поступающего через обе решетки на фотодетектор.
Если такие датчики научить распознавать поляризацию света, то можно на их основе создавать селекционные контроллеры, которые будут реагировать только на объекты, хорошо отражающие свет.

Индуктивные
Принцип функционирования индуктивных контроллеров в одном из исполнений похож на принцип работы емкостных контроллеров, где емкость изменялась за счет внесения в конденсатор диэлектрика.
Правда, в индуктивные приборы вносится не диэлектрик, а сердечник в трансформатор. Сердечник связан с движущейся целью. Чем он больше проникает между обмотками, тем больше амплитуда, например, напряжения во вторичном проводе.
По размерности сигнала во вторичном проводе можно иметь представление о положении интересующей цели.
Такие регистры имеют и другую конфигурацию. Они могут состоять из ферромагнетика и измерителя индуктивности. Ферромагнетик связан с движущейся целью. По близости ферромагнетика к измерителю можно судить о положении объекта.
Индуктивные контроллеры во втором исполнении можно применять только для контроля небольших перемещений.

Вихретоковые
Такие контроллеры в своем составе имеют генератор магнитного поля и его регистратор. Регистратор определяет индукцию создаваемого поля. Движущаяся цель создает побочное магнитное поле с помощью вихревых токов. Оно пересекается с исходным полем, создаваемым генератором.
От пересечения магнитных линий изменяется индукция поля. Изменение индукции фиксирует регистратор. По нему можно судить о положении цели.

Ультразвуковые
Они представляют собой радары. Принцип их действия простой: источник контроллера излучает ультразвуковую волну, она сталкивается с движущейся целью, отражается от него, а приемник контроллера ее фиксирует. По различию параметров отраженной и принимаемой волны делают выводы о положении движущегося объекта.

Магниторезистивные
Такой контроллер в своем составе имеет постоянный и пластины, параметры которых зависят от величины магнитного поля вокруг, включенные по схеме, называемой “мостом”. Последние изменяют свое сопротивление в зависимости от индукции вокруг них.
Брусок из ферромагнетика, связанный с движущимся объектом, в зависимости от положения последнего, перемещается в поле, изменяет его индукцию, пластины меняют импеданс, и схема регистрирует фактически изменение этого сопротивления. По величине этого рассогласования судят о положении нужной цели.

Потенциометрические
Эти датчики – одни из самых простых контроллеров движения. Все, что они имеют в своем составе, это источник сигнала и потенциометр, регулятор которого связан с движущейся целью.
В зависимости от положения ручки меняется разность потенциалов на переменном резисторе.
По величине этого напряжения можно судить о положении цели.

Магнитострикционные
Эффект магнитострикции состоит в изменение объема и габаритов какого-либо тела при изменении его намагниченности. Регистры на основе этого эффекта состоят из волновода (трубки), по которому перемещается магнит в форме кольца. Внутри трубки находится провод с подключенными к нему генератором и регистром импульсов. Поле, создаваемое проводником, складывается с полем, создаваемым магнитом.
Суммированное поле вращает трубку, что позволяет волноводу создавать импульсы вращения, попадающие на регистратор. По задержке между отправлением электроимпульса и приходом импульса от волновода можно определить расстояние до кольца, а положение магнита дает представление о положении перемещающейся цели.
На основе эффекта Холла
Контроллеры, принцип функционирования которых объясняется действием этого эффекта, похожи на магниторезистивные.
Эффект Холла состоит в изменении напряжения проводника при прохождении через него электрического тока.

Области применения
Любой регистратор движения представляет собой индикатор с аналогово-цифровым преобразователем. Аналоговый сигнал – изменение напряжения, емкости конденсатора, амплитуды во вторичной обмотке и других параметров. Цифровой сигнал – то, что управляет подключенной к датчику системой.
Каким-то системам достаточно лишь двух сигналов с датчика – нуля и единицы. К ним относятся системы сигнализации (извещатели), в которых ноль – дверь закрыта, единица – дверь открыта; системы управления светом (ноль – никого нет в помещении, свет выключен, единица – в помещении есть движение, свет включен).
Хотя есть системы, в которых важна точность измерений подобных датчиков. Например, станки с числовым программным управлением, которые на основе данных с датчика движения могут регулировать положение в пространстве работающего механизма (иглы или сверла).

Обзор производителей
На рынке представлено большое количество производителей датчиков линейного движения, среди которых:
- ЭЛТЕХ;
- Longfellow-2;
- DuraStar;
- DEPP;
- HENGXIA;
- Roundss.
Эти компании выпускают продукцию различного качества, разного функционала и разной ценовой категории.
Важно! Стоимость всех далее приведенных устройств, которые производятся не в России, зависит от курса рубля.
ЭЛТЕХ
ЭЛТЕХ – компания из Санкт-Петербурга, которая является крупнейшим производителем подобных контроллеров в стране. Они выпускают датчики емкостного, индуктивного и магниторезистивного типа.

Longfellow-2 и DuraStar
Longfellow-2 и DuraStar – датчики линейного движения, относящиеся к типу потенциометрических. Они способны улавливать изменения движения в пределах до 6,1 см с точностью 0,5%.
Чем дороже стоят модели, тем больший диапазон измерений они поддерживают.

DEPP EP15-series
Модель датчика китайской компании DEPP, относящегося к типу устройств, в основе которых лежит изменение магнитной индукции поля. Они применяются в станках и системах автоконтроля.
HENGXIA K100-series
Модель оптического датчика, которая может фиксировать размеры в диапазоне 0,5 – 72 см.
Roundss Rlc50d
По сути, этот датчик – электронная рулетка, которая с высокой точностью определяет необходимые расстояния.

Как изготовить своими руками
Проще всего создать потенциометрический датчик и подключить к нему какой-либо микропроцессор.
Для создания потенциометрического датчика нужно взять блок питания и потенциометр, регулировочную ручку которого следует подключить к перемещаемому объекту. К потенциометру нужно подключить один из выводов микроконтроллера в режиме АЦП (обязательно через ограничительный резистор, чтобы вход не сгорел), а к другому выводу следует подключить систему, управление которой осуществляется (аналогично через резистор).
Не так сложно изготовить индуктивный датчик. Для этого понадобится тот же микроконтроллер с входом в режиме АЦП, две обмотки для будущего трансформатора и регулируемый сердечник. Подвижную часть сердечника нужно подключить к движущемуся объекту, АЦП – ко вторичной обмотке, первичную обмотку соединить с источником питания, к другому выводу микроконтроллера следует подключить управляемую систему. Нельзя забывать об ограничительных резисторах.

По аналогии можно собрать емкостной датчик с введением диэлектрика. Вместо обмоток трансформатора подключаются обкладки конденсатора, вместо ферромагнетика сердечника – любой диэлектрик.
Можно собрать и лазерный датчик линейного перемещения. Как раз такой применяется в станках с ЧПУ. Проблем с приобретением самого излучателя нет. Они могут возникнуть на этапе обработки сигнала с лазерного излучателя. Делать это проще всего с помощью микроконтроллера (например, SMT или AVR), но для отладки обработки этого сигнала потребуется потратить много времени, если нет большого опыта в проектировании таких устройств.
Технические устройства с более сложной конструкцией, конечно, тоже можно самостоятельно собрать. Тем более, что их схемы доступны в интернете, вопрос только в подборе номиналов элементов. Хотя лучше приобрести готовые изделия, потому что они заранее проверены и настроены инженерами компании-изготовителя.
Правила эксплуатации
Первое, что нужно уяснить при эксплуатации подобных датчиков –, они не любят резких воздействий со стороны, к которым относятся удары, вибрация, падения и т.д. Дорогие датчики линейного перемещения – высокочувствительные устройства и в них устанавливаются элементы, не переносящие деформации. Удар или деформация может повредить контакт регистратора, и тогда датчик будет показывать неточный результат (или не будет его выводить вообще).
Например, подвижная сетка оптического датчика крайне чувствительна к внешним воздействиям, как и регистраторы в магнитострикционных и магниторезистивных типах моделей.
Также не следует пытаться дорабатывать датчики самостоятельно, если нет никакого опыта в подобных модернизациях. Если контроллер рассчитан на определенную точность, не нужно пытаться ее повысить. Для этого придется пересчитывать номиналы всех элементов в устройстве и, если допустить ошибку, можно его сломать.
Датчики линейного перемещения требуют к себе бережного отношения, если речь идет о бытовых контроллерах, а не об устройствах, которые должны нормально работать в экстренных условиях, вроде датчиков, применяемых в горнодобывающей промышленности.
Контроллеры, предназначенные для работы в особых условиях, не продаются в бытовых магазинах или на популярных китайских сайтах. Изготавливаются они во многих случаях на заказ на специальных предприятиях, а их стоимость в разы выше, чем у массовых аналогов.
prodatchik.ru
Датчики линейного перемещения — потенциометрический, индуктивный и самодельный
Классификация приборов
Датчики линейного перемещения имеют несколько классификационных уровней, но основным является принцип действия, который определяет функциональное назначение и область использования приборов.

По принципу действия приборы контроля и измерения перемещений можно разделить на:
- Емкостные.
- Оптические (оптоэлектронные).
- Индукционные.
- Датчики магнитострикционного типа.
- Ультразвуковые.
- Резистивные, магниторезистивные и потенциометрические.
- Приборы, использующие в своей работе эффект Холла в быту, практически не используются.
В бытовых охранных системах и устройствах контроля доступа и перемещений преимущественное распространение получили первые четыре группы датчиков.
Область применения датчиков
Любой датчик движения, вне зависимости принципа действия, предназначен для преобразования линейного перемещения в цифровой или аналоговый сигнал, который затем поступает к электронному блоку измерения или срабатывания. От принципа действия зависит точность измерения.
Часто нет необходимости в замере конкретной величины перемещения. Например, в охранных системах достаточно просто определить наличие перемещения в зоне контроля. Эти приборы получили название датчиков движения. От них не требуется высокая точность замера величины. Поэтому дешевые емкостные, оптические или индукционные устройства здесь наиболее распространены.
В промышленно-производственных системах автоматического управления требуется измерения величины перемещения. Причем измерение (например, в станках с числовым программным управлением) должно быть проведено с высокой точность и осуществляется или непрерывно, или дискретно – через определенные промежутки времени. В этом случае наибольшее распространение получили магнитострикционные приборы.

Емкостные датчики
Простейший емкостный датчик по своей конструкции напоминает конденсатор. При движении контролируемого объекта его емкость может изменяться путем:
- Изменения величины зазора между пластинами.
- Изменения взаимного положения пластин и как следствие этого увеличения (уменьшения) зоны взаимного перекрытия.
- Изменения диэлектрической проницаемости изолирующего слоя.
При изменении емкости устройства эта величина может сама по себе служить сигналом, передаваемый к электронным блокам управления, а может включать генератор импульсов, которые более просто поддаются дальнейшей обработке.

Наибольшее распространения емкостные устройства контроля перемещения нашли:
- В качестве источника сигнала в системах контроля заполнения резервуаров жидким или порошкообразным продуктом.
- Как прибор, контролирующий начало – окончание рабочего хода исполнительного органа робототехнических систем и автоматических станков и линий.
- Для позиционирования различных объектов.
- Как обычный конечный бесконтактный выключатель.
- В системах контроля и охранной сигнализации как «датчик присутствия».
Благодаря своей невысокой стоимости и надежности, емкостные устройства нашли самое широкое распространения в отдельных системах комплекса жизнеобеспечения «умный дом».
К их достоинствам, по сравнению с устройствами, использующими другой принцип действия, можно отнести:
- Упрощенную технологию массового производства, с использованием недорогих, широко распространенных материалов.
- Высокую чувствительность при малом энергопотреблении.
- Компактные размеры и незначительный вес.
- Долговечность, простоту и надёжность эксплуатации.
- Простоту адаптирования устройства к решению различных задач и возможность встраивания в любую конструкцию.
Основными факторами, сдерживающими широкое применение в высокоточных системах управления, являются:
- Относительно низкий коэффициент преобразования.
- Необходимость тщательной экранировки элементов датчика.
- Повышение точности работы прибора на более высоких частотах по сравнению с промышленной частотой в 50,0 герц.
- Высокая вероятность ложных срабатываний при изменении атмосферных условий (снег, дождь) что требует повышенной защиты источника сигнала.
Индукционные датчики
Сигнал в индукционных датчиках формируется за счет изменения индуктивности катушки. Приборы этого типа отличаются высокой точностью, при незначительных габаритах. Индукционные приборы контроля способны проводить измерения дистанционно, а по типу их подразделяют на простые и дифференциальные.

Одно из конструктивных исполнений этих устройств представляет собой трансформатор, сердечник которого имеет возможность передвигаться. При перемещении сердечника индуктивность катушки меняется и это изменение является сигналом. Значение индуктивности изменяется пропорционально уровня перемещения сердечника.
Если контроль перемещения осуществляется в отношении ферримагнитных объектов, то сердечник не требуется. Деталь, попадая в поле электромагнитного излучения катушки, меняет ее индуктивность и формирует управляющий сигнал.
Контролирующие датчики индукционного типа нашли широкое применение в станках с программным управлением, бесконтактных системах охраны и для фактического измерения перемещения, с отчетом его значения по цифровой шкале или с выводом информации на экран жидкокристаллического дисплея.
Оптические и оптоэлектронные приборы контроля перемещений
Набольшее распространение для контроля движения и измерения расстояния получили оптические триангуляторы, являющиеся по своей сути обычным оптическим (лазерным) дальномером. Для контроля малых изменений линейных величин применяются приборы с поляризационной решеткой. Кроме того, оптические датчики широко используются в системах охраны в качестве «лучевого барьера».
К достоинствам этой категории приборов можно отнести:
- Реализацию бесконтактного контроля.
- Высокую точность.
- Практически мгновенно формирование управляющего сигнала (отсутствие времени задержки срабатывания).
Недостатками высокоточных оптических датчиков считаются:
- Значительная стоимость.
- Критичность к условиям окружающей среды.
Производители различного типа приборов
Крупнейшим российским производителем приборов для контроля перемещений является компания «ЭЛТЕХ» (Санкт-Петербург), специализирующая на устройства для контроля и измерения величины линейного перемещения индуктивного, резистивного и емкостного типа.
Линейные потенциометры модельных линий «Longfellow-2» и «DuraStar» обеспечивает измерение величины перемещения в пределах до 610,0 миллиметров с точностью 0,5%. Стоимость приборов зависит от измеряемого диапазона (модели) и объема поставки и оговаривается при заказе.

В последнее время большой популярностью пользуется недорогие, но достаточно точные приборы китайского производства.
Наиболее распространены следующие модели:
- «DEPP EP15-series» – приборы индукционного типа, применяемые в станках и системах автоматического контроля;
- Оптическое устройство «HENGXIA K100-series» позволяет контролировать размеры в диапазоне 50,0…7200,0 миллиметров;
- Линейный энкодер «Roundss Rlc50d» по сути является электронной рулеткой, позволяющей с высокой точностью замерять размеры и контролировать пройденный путь.
Стоимость китайской продукции зависит от курсовой стоимости рубля и уточняется при заказе.
Прибор контроля перемещения своими руками
Прибор для измерения величины перемещения изготовить самостоятельно практически невозможно. Однако радиолюбители достаточно часто собирают из вышедшей из строя радио и электронной аппаратуры датчики движения, которые с успехом используются в системах безопасности и жизнеобеспечения.
Например, датчик можно использовать для включения света в туалете, когда в помещение санузла заходит человек. Не менее популярны подобные устройства для включения-отключения освещения в жилых помещениях.
И конечно эти приборы незаменимы при формировании собственной системы безопасности, где они фиксируют любую попытку (неважно человек это или животное) несанкционированного проникновения на территорию защищаемого объекта (садового участка, балкона, гаража). Изготовление самодельного датчика движения рассмотрим на примере сборки оптоэлектронного устройства, контролирующего пересечение охраняемого периметра.
Из деталей для изготовления самого прибора потребуются:
- Блок питания от мобильного телефона с напряжением на входе 5,0 вольт.
- Фотоэлемент – лучше фоторезистор.
- Биполярный транзистор с «p-n-p» – переходом.
- Построечный потенциометр (сопротивление) с диапазоном регулировки 0…10,0 килоом.
- Электромагнитное реле, срабатывавшее при напряжении 5,0 вольт.
- В качестве источника излучения идеально подойдет лазерная указка, дающая тонкий, узконаправленный луч.
Порядок соединения схемы следующий:
- Катод фотоэлемента припаивается к плюсовому проводнику блока питания – эта точка будет является общим (массовым) проводником.
- К аноду фотоэлемента присоединяется просторечный потенциометр, при выведении его движка в среднее положение.
- Свободный контакт потенциометра припаивается к отрицательному проводнику блока питания, а контакт от его движка к базе транзистора.
- Эмиттер транзистора включается подсоединяется к общему «плюсу» схемы, а коллектор соединяется с одним из контактов реле.
- Второй контакт реле припаивается к отрицательному проводу блока питания.
При освещении окошка фотоэлемента лазерной указкой, поворотом движка потенциометра добиваются надежного срабатывания реле. К коммутационным контактам реле можно подключить любой источник сигнала – ревун, лампу накаливания, светодиодный индикатор. Недостатком данного устройства является то, что оно срабатывает только при пересечении луча света.
То есть в режиме ожидания все его элементы функционируют. При различных способах коммутации контактов реле можно добиться включения света при первом пересечении луча и его отключении при повторном.
hqsignal.ru
21125-13: WA Датчики перемещения индуктивные
Назначение
Датчики перемещений индуктивные WA (далее — датчики) предназначены для измерений перемещений механизмов, узлов и деталей в испытательном и обрабатывающем оборудовании.
Описание
Датчик состоит из корпуса, внутри которого расположены измерительные обмотки, сердечник и измерительный щуп, выступающий наружу. В соответствующем исполнении вместо щупа применен плунжер, который служит для соединения с перемещающимся объектом. Электрическое подключение датчика производится через электронный блок WA-Electronic, входящий в комплект поставки.
Датчики выпускаются в двух модификациях: WAх/L (со свободно перемещающимся плунжером) и WAх/T (с подпружиненным щупом), где х — обозначает диапазон измерения.
В зависимости от диапазонов измерений применяется следующее обозначение: датчики с плунжером — WA2/L, WA10/L, WA20/L, WA50/L, WA100/L, WA200/L, WA300/L, WA500/L; датчики с подпружиненным щупом — WA2/T, WA10/T, WA20/T, WA50/T, WA100/T.
Принцип действия всех датчиков одинаковый и основан на изменении индуктивности датчика при перемещении сердечника относительно неподвижных измерительных обмоток и последующем преобразовании линейных перемещений в пропорциональный электрический сигнал.
Показание датчика считывается вольтметром. Питание датчика осуществляется от источника питания, подключенного по мостовой схеме. Входное сопротивление датчика 350±35 Ом, выходное сопротивление 680±68 Ом.
В датчиках с подпружиненным щупом WA2/T, WA10/T, WA20/T и WA50/T измерительное усилие в начальном положении составляет приблизительно 2,4Н при постоянной пружины 0,116 Н/мм, а в датчике WA100/T — приблизительно 2 Н при постоянной пружины 0,063 Н/мм.
На рисунке 1 показан внешний вид датчика перемещений индуктивного WAх/L с плунжером, а на рисунке 2 — внешний вид датчика перемещений индуктивного WA с измерительным щупом
Технические характеристики
|
Название характеристики |
Датчики WAx/L с плунжером |
Датчики WAx/T со щупом |
|
Диапазоны измерений перемещений, мм |
0-2; 0-10; 0-20; 0-50; 0-100; 0-200; 0-300; 0-500 |
0-2; 0-10; 0-20; 0-50; 0-100 |
|
Пределы допускаемой основной приведенной к верхнему пределу измерений погрешности, % |
± 0,1 | |
|
Пределы допускаемой дополнительной погрешности измерений перемещений, вызванной изменением температуры окружающего воздуха на 10 °С в диапазоне рабочих температур, % от текущего значения |
± 0,1 | |
|
Номинальное напряжение питания, В |
2,5 | |
|
Несущая частота тока питания, кГц |
4,8 | |
|
Габаритные размеры не более (диаметр х длина*), мм | ||
|
— корпус датчика |
12 х (69 — 581,8) |
12 х(130 -372,6) |
|
— плунжер (щуп) |
(1,2 — 3,7) х (40 -534) |
5,5 х (14 — 104) |
|
Масса не более, г | ||
|
— корпус датчика** |
55 — 276 |
55 — 104 |
|
— плунжер** |
4 — 42 |
— |
|
Диапазон рабочих температур, °С |
от минус 20 до 80 | |
х — обозначение диапазона измерения * в нулевом положении в зависимости от исполнения ** в зависимости от исполнения
Знак утверждения типа
Знак утверждения типа наносится на корпус датчика методом наклейки и на титульный лист руководства по эксплуатации типографским способом.
Комплектность
|
Наименование |
Количество |
|
Датчик* |
1 * |
|
Электронный блок WA-Electronic |
1 |
|
ЗИП |
1 комплект |
|
Наименование |
Количество |
|
Эксплуатационная документация |
1 экз. |
|
Методика поверки |
1 экз. |
* типы датчиков и количество определяются при заказе потребителем.
Поверка
осуществляется по документу МП 21125-13 «Датчики перемещений индуктивные WA. Методика поверки», утвержденному ГЦИ СИ ФГУП «ВНИИМС» в феврале 2013 г.
Основные средства поверки: прибор универсальный для измерений длины DMS 1000: д. и. от 0 до 100 мм, ПГ ± (0,2+L/1000) мкм, меры длины концевые плоскопараллельные, набор № 1, ГОСТ 9038-73, размеры (1,0^100) мм, 2-ой класс точности, меры длины концевые плоскопараллельные, набор № 8, ГОСТ 9038-73, размеры (125^500) мм, 2-ой класс точности, измерительный усилитель MVD2555, класс точности
0,1, д. и. при UB=2,5 В: от 0,2 до 400 мВ/В.
Сведения о методах измерений
Методы измерений изложены в технической документации изготовителя.
Нормативные и технические документы, устанавливающие требования к датчикам перемещений индуктивным WA
ГОСТ Р 8.763-2011 «ГСИ. Государственная поверочная схема для средств измерений длины в диапазоне 1х10-9 .50 м и длин волн в диапазоне 0,2 … 50 мкм», техническая документация изготовителя.
Рекомендации к применению
Выполнение работ по оценке соответствия промышленной продукции и продукции других видов, а также иных объектов установленным законодательством Российской Федерации обязательным требованиям.
all-pribors.ru
индуктивный датчик перемещений — патент РФ 2367902
Изобретение относится к измерительной технике. Сущность: индуктивный датчик перемещений содержит две индуктивности (1, 2), выполненные в форме плоских прямоугольных меандров, нанесенные на диэлектрические пластины (3, 4). Индуктивности (1, 2) расположены параллельно друг к другу со смещением на четверть периода меандра. С одной стороны индуктивности соединены между собой гибким проводником (15), а с другой — с конденсатором (7) с образованием колебательного контура в составе транзиторного генератора переменного напряжения (8). Относительное линейное перемещение диэлектрических пластин (3, 4) вызывает изменение суммарной индуктивности датчика, резонансной частоты колебательного контура и выходной частоты генератора переменного напряжения (8). Технический результат: повышение точности измерения перемещений. 2 з.п. ф-лы, 1 табл., 6 ил.
Изобретение относится к измерительным устройствам, основанным на использовании электрических и магнитных средств, в частности к информационным измерительным системам для измерения различных физических величин электрическими методами, например деформации, силы, давления, веса и др., с точностью не более 0,1% от измеряемой величины.
Известны следующие типы датчиков для измерения перемещения: емкостные, тензорезисторные, индуктивные и др. Индуктивные датчики перемещений по сравнению с тензорезисторными и емкостными имеют следующие преимущества:
— отсутствие эффекта старения;
— отсутствие влияния давления и влажности окружающей среды на точность измерений;
— широкий диапазон измеряемых перемещений.
Перемещение отдельных элементов индуктивных датчиков, вызванное воздействием на них различных сил, ведет к изменению индуктивности, которое преобразуется в информационный сигнал. В индуктивных датчиках изменение индуктивности за счет перемещения может происходить путем растяжения или сжатия витков катушки, путем перемещения внутри катушки или рядом с ней сердечника из ферромагнитного или диамагнитного материала, изменением ширины щели в замкнутом ферромагнитном сердечнике катушки или изменением взаимной индуктивности двух катушек, включенных параллельно или последовательно.
Однако, датчики, содержащие ферромагнитные элементы, имеют ощутимую температурную зависимость индуктивности, что снижает точность измерений.
Известен дифференциальный индуктивный датчик перемещений (RU 2017059 С1, 5 G01B 7/00, 30.07.1994) [1], который содержит два неподвижных ферромагнитных сердечника, два подвижных якоря и две пары индуктивных обмоток, соединенных по мостовой схеме. Подвижные якори выполнены в виде полых ферромагнитных цилиндров, на торцах которых укреплены немагнитные кольцеобразные накладки для создания токовихревого эффекта. Основной якорь жестко связан со штоком, который связан с объектом контроля, и перемещается в осевом направлении. Имеется еще один дополнительный якорь и две одинаковые обмотки, которые размещены в дополнительных кольцевых полостях, выполненных в ферромагнитных сердечниках. Этот якорь жестко скреплен с дополнительным штоком, который коаксиально установлен внутри основного штока и связан со вторым объектом измерения. Основной и дополнительный якоря датчика снабжены расположенными посередине буртами с такими же диаметральными размерами, что и у неподвижных ферромагнитных сердечников, такая конструкция повышает чувствительность датчика. При отклонении основного якоря от нейтрального положения и перемещении его в полостях между внутренними и внешними цилиндрическими частями неподвижных сердечников изменяются площади воздушных зазоров. Это приводит к изменению индуктивного сопротивления обмоток, являющихся плечами мостовой схемы. Равновесие моста нарушается и на его выходе появляется сигнал, пропорциональный линейному перемещению штока и связанного с ним объекта измерения. Одновременно отклонение от нейтрального положения дополнительного якоря приводит к изменению индуктивного сопротивления дополнительных обмоток и, как следствие, к разбалансу мостовой схемы и появлению на выходе сигнала, пропорционального линейному перемещению второго объекта. В итоге, результирующий сигнал будет равен алгебраической сумме перемещений двух контролируемых объектов.
С использованием этого датчика возможно измерять линейные перемещения двух объектов, однако он имеет сложную конструкцию, а наличие ферромагнитных элементов повышает температурную зависимость индуктивности.
Известен магнитомодуляционный индуктивный датчик перемещений (RU 2023235 С1, 5 G01B 7/00, 15.11.1994) [2], который содержит магнитопровод, выполненный в виде П-образных зигзагов, имеющий три боковых участка, с расположенными на них неподвижными обмотками индуктивности, которые включены в мостовую схему измерения переменного тока, в которую также включена дополнительная постоянная индуктивность; и две подвижные обмотки подмагничивания, подключенные к источнику со стабильным постоянным током, установленные на параллельных участках зигзагообразного магнитопровода, с возможностью линейного перемещения вдоль них, и предназначенные для связи с двумя объектами контроля. При среднем положении подвижных обмоток мостовая схема сбалансирована, при перемещении одной из обмоток, например, влево, в левой части магнитная индукция увеличивается, а в правой — уменьшается, это приводит к разбалансировке мостовой схемы, таким образом, с изменением координаты подвижной обмотки пропорционально изменяется напряжение на выходе мостовой схемы датчика. Аналогично при перемещении второй подвижной обмотки в ту или другую сторону от нейтральной линии магнитопровода датчика напряжение на выходе мостовой схемы также изменяется пропорционально величине перемещения. При одновременном перемещении обеих подвижных обмоток снимаемое с выходных зажимов датчика напряжение, также как и в указанном выше аналоге, пропорционально алгебраической сумме линейных перемещений двух объектов.
Известный датчик предназначен для измерений больших перемещений, определяемых размерами магнитопровода, и имеет низкую чувствительность при малых перемещениях.
Наиболее близким по технической сущности к заявляемому изобретению является индуктивный датчик перемещения (RU 2221988 С1, 5 G01B 7/00, 20.01.2004) [3], принимаемый за прототип, содержащий в одном из вариантов выполнения две индуктивности, устанавливаемые на взаимно перемещаемых объектах, генератор переменного напряжения, конденсатор, два диода и два сердечника, выполняемые соизмеримыми по величине с индуктивностями, один из которых снабжен тягой из неметаллического неферромагнитного материала, закрепленной на сердечнике со стороны второй индуктивности, а второй выполнен с продольным сквозным отверстием для прохода тяги, индуктивности выполнены в виде катушек, диоды и индуктивности образуют мостовую схему, в плече которой один из диодов соединен последовательно с одной из индуктивностей. Одна точка соединения плеч подключена к первому выводу генератора, а другая точка соединения плеч — к конденсатору, второй вывод которого соединен со вторым выводом генератора. Выводы конденсатора являются выходом устройства, к которому подключается измеритель напряжения постоянного тока. В исходном состоянии сердечники установлены в катушках так, что постоянное напряжение на выходе устройства равно нулю. При перемещении объектов относительно друг друга сердечники смещаются вдоль оси катушек, их индуктивности изменяются, это вызывает разбалансировку мостовой схемы и, как следствие, на выходе устройства появляется постоянное напряжение соответствующей полярности, пропорциональное величине перемещения объектов.
Недостатками устройства-прототипа являются:
— заметное изменение индуктивности происходит при перемещениях сердечника, сравнимых с длиной катушки индуктивности, что приводит к уменьшению чувствительности при малых перемещениях и, следовательно, к снижению точности измерений;
— возможность касания сердечника с катушкой приводит к возникновению погрешности измерений, обусловленной трением;
— температурная зависимость магнитной проницаемости ферромагнитного сердечника и нелинейность вольтамперной характеристики диодов приводит к снижению точности измерений.
Задачей, решаемой настоящим изобретением, является повышение точности измерения малых перемещений объекта за счет исключения использования ферромагнитного материала и диодов, имеющих нелинейную вольтамперную характеристику.
Указанный технический результат достигается тем, что индуктивный датчик перемещений содержит две индуктивности, установленные на взаимно перемещаемых объектах, генератор переменного напряжения и конденсатор. Согласно изобретению, проводник каждой индуктивности выполнен в форме плоского прямоугольного меандра, проводники расположены на внутренних поверхностях параллельных диэлектрических подложек и смещены в исходном положении относительно друг друга на четверть периода меандра, выходы индуктивностей с одной стороны соединены между собой гибкими проводниками, а с другой стороны — с обкладками конденсатора, с образованием колебательного контура в составе генератора переменного напряжения, частота генерации которого зависит от резонансной частоты колебательного контура и выходы которого являются входами регистрирующего устройства.
В частном случае выполнения проводники индуктивностей нанесены на диэлектрическую подложку методом травления.
В другом частном случае выполнения проводники индуктивностей нанесены на диэлектрическую подложку методом изготовления печатных плат.
Изобретение поясняется чертежами. На фиг.1 изображена электрическая схема индуктивного датчика перемещения.
На фиг.2 — форма выполнения проводников индуктивностей.
На фиг.3 — схема индуктивного датчика перемещения, размещенного на упругом элементе электронных весов.
На фиг.4 — график температурной зависимости частоты генерации f, Гц, от воздействующего веса Р, г. Кривая 1 соответствует измерению при Т=0°С, кривая 2 — при Т=10°С, кривая 3 — при Т=20°С, кривая 4 — при Т=30°С.
На фиг.5 — график зависимости погрешности измерений % от веса Р, г, где кривая 1 соответствует измерению при Т=0°С, кривая 2 — при Т=10°С, кривая 3 — при Т=20°С, кривая 4 — при Т=30°С.
На фиг.6 — график зависимости частоты f, Гц, генератора переменного напряжения от перемещения в периодах меандра d.
В таблице приведены данные температурной зависимости частоты генерации f, Гц, от воздействующего веса Р, г.
Индуктивный датчик перемещений содержит две индуктивности 1, 2 (фиг.1), устанавливаемые на взаимно плоско параллельно перемещаемые объекты, представляющие собой проводники, выполненные в форме плоских прямоугольных меандров 1, 2 (фиг.2), расположенные на внутренних поверхностях параллельных диэлектрических подложек 3, 4 и смещенные относительно друг друга на расстояние, равное четверти периода меандра 1/4 d. Выходы индуктивностей с одной стороны соединены между собой гибкими проводниками 5, а с другой стороны — проводниками 6 с обкладками конденсатора 7, с образованием колебательного контура в составе транзисторного генератора переменного напряжения 8, частота генерации которого зависит от резонансной частоты колебательного контура, и выходы являются входами регистрирующего устройства (не показано).
Относительное перемещение подложек 3, 4 с плоскими прямоугольными меандрами 1, 2 вызывает изменение индуктивности и, следовательно, резонансной частоты колебательного контура, образованного индуктивностями 1, 2 и конденсатором 7, и изменение выходной частоты f генератора переменного напряжения 8, которое определяет величину измеряемого перемещения.
Индуктивный датчик перемещения был апробирован в электронных весах. Для этого датчик с периодом меандра d=2,5 мм был смонтирован на упругом элементе электронных весов 9 (фиг.3), который опирается на основание и обеспечивает взаимное плоскопараллельное перемещение подложек 3, 4 с индуктивностями 1, 2 под действием веса Р, г, приложенного к упругому элементу 9. Из таблицы и построенной на основании полученных измерений зависимости частоты генератора переменного напряжения 9 от воздействующего веса Р, г (фиг.4), следует, что зависимость частоты генерации от воздействующего веса имеет практически линейный характер, то есть легко может быть переведена в значения измеряемой величины и мало зависит от температуры.
Более точная оценка влияния температуры и величины отклонения частоты генерации от линейности следует из графика (фиг.5), где отклонение от линейности не превышает 0,1%, что соответствует ошибке измерения веса также в 0,1%.
Что касается точности измерения перемещения, то для индуктивного датчика перемещений с периодом меандра d=2,5 мм при воздействии веса в 4000 г, перемещение, измеренное с помощью микрометра, равно 100±1 мкм, таким образом, погрешность измерения перемещения составляет 0,1 мкм.
Поскольку проводники индуктивностей 1, 2 имеют периодическую структуру, зависимость частоты f, Гц, генератора переменного напряжения от перемещения, в периодах меандра d также периодична (фиг.6), для обеспечения максимально линейной зависимости частоты генерации от перемещения, в исходном состоянии при отсутствии перемещения, меандры 1, 2 подложек 3, 4 должны быть смещены на 1/4 d.
Устройство с периодом меандра d=2,5 мм позволяет производить измерение перемещений с точностью 0,1 мкм без использования микропроцессорной коррекции нелинейности, а при их использовании может быть достигнута точность в 0,01 мкм, кроме того, точность измерений повышается с уменьшением периода меандра.
| Температурная зависимость частоты генерации f, Гц от воздействующего веса Р, г | ||
| Т, °С | Р, г | f, Гц |
| 0 | 0 | 320416 |
| 500 | 349489 | |
| 1000 | 378600 | |
| 1500 | 407743 | |
| 2000 | 436882 | |
| 2500 | 465995 | |
| 3000 | 495056 | |
| 3500 | 524127 | |
| 10 | 0 | 318430 |
| 500 | 347772 | |
| 1000 | 377138 | |
| 1500 | 406534 | |
| 2000 | 435915 | |
| 2500 | 465288 | |
| 3000 | 494589 | |
| 3500 | 523910 | |
| 20 | 0 | 316054 |
| 500 | 345710 | |
| 1000 | 375374 | |
| 1500 | 405070 | |
| 2000 | 434740 | |
| 2500 | 464370 | |
| 3000 | 493970 | |
| 3500 | 523591 | |
| 30 | 0 | 314990 |
| 500 | 344769 | |
| 1000 | 374548 | |
| 1500 | 404363 | |
| 2000 | 434144 | |
| 2500 | 463910 | |
| 3000 | 493610 | |
| 3500 | 523341 |
Источники информации
1. RU 2017059 C1, 5 G01B 7/00, 30.07.1994.
2. RU 2023235 C1, 5 G01B 7/00, 15.11.1994.
3. RU 2221988 C1, 5 G01B 7/00, 11.11.2002 — прототип.
ФОРМУЛА ИЗОБРЕТЕНИЯ
1. Индуктивный датчик перемещений, содержащий две индуктивности, установленные на взаимно перемещаемых объектах, генератор переменного напряжения и конденсатор, проводник каждой индуктивности выполнен в форме плоского прямоугольного меандра, проводники расположены на внутренних поверхностях параллельных диэлектрических подложек и смещены в исходном положении относительно друг друга на четверть периода меандра, выходы индуктивностей с одной стороны соединены между собой гибкими проводниками, а с другой стороны с обкладками конденсатора, с образованием колебательного контура в составе генератора переменного напряжения, частота генерации которого зависит от резонансной частоты колебательного контура, и выходы являются входами регистрирующего устройства.
2. Индуктивный датчик по п.1, отличающийся тем, что проводники индуктивностей нанесены на диэлектрическую подложку методом травления.
3. Индуктивный датчик по п.1, отличающийся тем, что проводники индуктивностей нанесены на диэлектрическую подложку методом изготовления печатных плат.
www.freepatent.ru
Датчики линейного перемещения: виды, устройство, принцип действия
О чем эта статья
Конструкция датчиков перемещения может быть очень разнообразном. Каждый тип имеет свои преимущества и недостатки, в этой статье вы узнаете принцип действия всех существующих на сегодняшний день датчиков перемещения.
Вы также можете посмотреть другие статьи. Например, «Виды деформации твердых тел» или «Датчики деформации (экстензометры)».
Датчик перемещения — это прибор, предназначенный для определения величины линейного или углового механического перемещения какого-либо объекта. Разумеется, подобные приборы имеют колоссальное количество практических применений в самых разнообразных областях, поэтому существует множество классов датчиков перемещения, которые различаются по принципу действия, точности, цене и прочим параметрам. Следует сразу отметить, что все датчики перемещения можно разделить на две основных категории — датчики линейного перемещения и датчики углового перемещения (энкодеры). В рамках данного обзора основное внимание будет уделено именно датчикам линейного перемещения.
По принципу действия датчики перемещения могут быть:
- Емкостными
- Оптическими
- Индуктивными
- Вихретоковыми
- Ультразвуковыми
- Магниторезистивными
- Потенциометрическими
- Магнитострикционными
- На основе эффекта Холла
Емкостные датчики перемещения
В основе работы датчиков данного типа лежит взаимосвязь ёмкости конденсатора с его геометрической конфигурацией. В простейшем случае речь идёт об изменении расстояния между пластинами вследствие внешнего физического воздействия (Рисунок 1). Поскольку ёмкость конденсатора изменяется обратно пропорционально величине зазора между пластинами, определение ёмкости при прочих известных параметрах позволяет судить о расстоянии между пластинами. Изменение ёмкости можно зафиксировать различными способами (например, измеряя его импеданс), однако в любом случае конденсатор необходимо включить в электрическую цепь.
Рисунок 1. Емкостной датчик линейного перемещения с изменяющейся величиной зазора.
Другой схемой, где выходным параметром является электрическая ёмкость, является схема, содержащая конденсатор с подвижным диэлектриком (Рисунок 2). Перемещение диэлектрической пластины между обкладками конденсатора также приводит к изменению его ёмкости. Пластина может быть механически связана с интересующим объектом, и в этом случае изменение ёмкости свидетельствует о перемещении объекта. Кроме того, если сам объект обладает свойствами диэлектрика и имеет подходящие габариты — он может быть использован непосредственно в качестве диэлектрической среды в конденсаторе.
Рисунок 2. Емкостной датчик линейного перемещения с подвижным диэлектриком.
Оптические датчики перемещения
Существует множество вариаций схем датчиков перемещения, основанных на различных оптических эффектах. Пожалуй, наиболее популярной является схема оптической триангуляции — датчик положения является, по сути, дальномером, который определяет расстояние до интересующего объекта, фиксируя рассеянное поверхностью объекта излучение и определяя угол отражения, что даёт возможность определить длину d — расстояние до объекта (Рисунок 3). Важным достоинством большинства оптических датчиков является возможность производить бесконтактные измерения, кроме того такие датчики обычно довольно точны и имеют высокое быстродействие.
Рисунок 3. Оптический датчик перемещения на основе схему оптической триангуляции.
В другой реализации оптического датчика, предназначенной для регистрации и определения параметров малых перемещений и вибраций, используется двойная решётчатая конструкция, а также источник света и фотодетектор (Рисунок 4). Одна решётка неподвижна, вторая подвижна и может быть механически закреплена на интересующем объекте или каким-либо способом передавать датчику его движение. Малое смещение подвижной решётки приводит к изменению интенсивности света, регистрируемой фотодетектором, причём с уменьшением периода решётки точность датчика возрастает, однако сужается его динамический диапазон.
Рисунок 4. Оптический датчик перемещения на основе дифракционных решеток.
Дополнительными возможностями применения обладают оптические датчики, учитывающие поляризацию света. В таких датчиках может быть реализован алгоритм селекции объектов по отражательным свойствам поверхности, т.е. датчик может «обращать внимание» только на объекты с хорошей отражающей способностью, прочие объекты игнорируются. Разумеется, чувствительность к поляризации негативно сказывается на стоимости подобных устройств.
Индуктивные датчики перемещения
В одной из конфигураций датчика данного типа чувствительным элементом является трансформатор с подвижным сердечником. Перемещение внешнего объекта приводит к перемещению сердечника, что вызывает изменение потокосцепления между первичной и вторичной обмотками трансформатора (Рисунок 5). Поскольку амплитуда сигнала во вторичной обмотке зависит от потокосцепления, по величине амплитуды вторичной обмотки можно судить о положении сердечника, а значит и о положении внешнего объекта.
Рисунок 5. Индуктивный датчик перемещения на трансформаторе.
Другая конфигурация имеет более простую схему, однако она пригодна лишь для небольшого количества приложений, где требуется определять незначительные перемещения или вибрации объектов, состоящих из ферромагнитного материала. В данной схеме интересующий ферромагнитный объект играет роль магнитопровода, положение которого влияет на индуктивность измерительной катушки (Рисунок 6).
Рисунок 6. Индуктивный датчик перемещения для объектов из ферромагнитных материалов.
Вихретоковые датчики перемещения
Датчики данного типа содержат генератор магнитного поля и регистратор, с помощью которого определяется величина индукции вторичных магнитных полей. Вблизи интересующего объекта генератор создаёт магнитное поле, которое, пронизывая материал объекта, порождает в его объёме вихревые токи (токи Фуко), которые, в свою очередь, создают вторичное магнитное поле (Рисунок 7). Параметры вторичного поля определяются регистратором, и на их основании вычисляется расстояние до объекта, так как чем объект ближе, тем больший магнитный поток будет пронизывать его объём, что усилит вихревые токи и индукцию вторичного магнитного поля. Подобный принцип используется и в вихретоковых дефектоскопах, однако там на параметры вторичного магнитного поля влияет не расстояние до объекта, а наличие в его внутренней структуре скрытых несовершенств. Метод является бесконтактным, однако может применяться только для металлических тел.
Рисунок 7. Вихретоковый датчик перемещения.
Ультразвуковые датчики перемещения
В ультразвуковых датчиках реализован принцип радара – фиксируются отражённые от объекта ультразвуковые волны, поэтому структурная схема обычно представлена источником ультразвуковых волн и регистратором (Рисунок 8), которые обычно заключены в компактный корпус. Определение временной задержки между моментами отправки и приёма ультразвукового импульса позволяет измерять расстояние до объекта с точностью, доходящей до десятых долей миллиметра. Наряду с оптическими, ультразвуковые датчики на сегодняшний день являются, пожалуй, наиболее универсальным и технологичным бесконтактным средством измерения. Использование этого принципа измерений опять же можно найти в детекторах обнаружения дефектов, только на этот раз уже в ультрозвуковых дефектоскопах.
Рисунок 8. Ультразвуковой датчик перемещения.
Магниторезистивные датчики перемещения
В магниторезистивных датчиках перемещения используется зависимость электрического сопротивления магниторезистивных пластинок от направления и величины индукции внешнего магнитного поля. Датчик, как правило, состоит из постоянного магнита и электрической схемы, содержащей включённые по мостовой схеме магниторезистивные пластинки и источник постоянного напряжения (Рисунок 9). Интересующий объект, состоящий из ферромагнитного материала, перемещаясь в магнитном поле, изменяет его конфигурацию, вследствие чего изменяется сопротивление пластинок, и мостовая схема регистрирует рассогласование, по величине которого можно судить о положении объекта.
Рисунок 9. Магниторезистивный датчики перемещения.
Датчики на основе эффекта Холла
Датчики этого типа имеют конструкцию подобную конструкции магниторезистивных датчиков, однако в основу их работы положен эффект Холла — прохождение тока через проводник, на который воздействует внешнее магнитное поле, приводит к возникновению разности потенциалов в поперечном сечении проводника.
Магнитострикционные датчики перемещения
Как правило, магнитострикционный датчик представляет собой протяжённый канал — волновод, вдоль которого может свободно перемещаться постоянный кольцевой магнит. Внутри волновода содержится проводник, способный при подаче на него электрических импульсов создавать магнитное поле вдоль всей своей длины (Рисунок 10). Полученное магнитное поле складывается с полем постоянного магнита, и результирующее поле создаёт момент вращения канала, содержащего волновод (эффект Вайдемана). Импульсы вращения распространяются по каналу в обе стороны со скоростью звука материала канала. Регистрация временной задержки между отправкой электрического импульса и приёма импульса вращения позволяет определить расстояние до постоянного магнита, т.е. определить его положение. Канал может иметь довольно большую длину (до нескольких метров), а положение магнита может быть определено с точностью до нескольких микрометров. Магнитострикционные датчики обладают отличной повторяемостью, разрешением, устойчивостью к неблагоприятным условиям и низкой чувствительностью к температурным изменениям.
Рисунок 10. Магнитострикционный датчик перемещения.
Потенциометрические датчики перемещения
Датчик данного типа в своей основе имеет электрический контур, содержащий потенциометр (Рисунок 11). Линейное перемещение объекта приводит к изменению сопротивления потенциометра (переменного резистора). Если через потенциометр пропускать постоянный ток, то падение напряжения на нём будет пропорционально величине сопротивления, и, следовательно, величине линейного перемещения интересующего объекта.
Рисунок 11. Потенциометрический датчик перемещения.
Наряду с механическими датчиками перемещения, потенциометрические датчики получили наиболее широкое распространение в силу своей простоты и низкой стоимости, однако для универсальных, прецизионных и бесконтактных измерений в последнее время всё чаще используются датчики на основе оптических эффектов.
Опубликована 31-03-12.
Если вам понравилась статья нажмите на одну из кнопок ниже
www.devicesearch.ru.com