Схемы включения индуктивных датчиков — Энциклопедия по машиностроению XXL
Индуктивные датчики давлений на лопасти включаются в одно из плеч мостовой схемы. Три остальных плеча представляют собой два сопротивления и компенсационный датчик, выполненный конструктивно так же, как рабочий. Индуктивные датчики обладают большой чувствительностью. Их комплексное сопротивление, номинальная величина которого равна 500 ом, изменяется при работе на 10% и более при / = 10 кгц. Поэтому схема включения индуктивных датчиков в измерительный мост может быть простейшей. При измерении давлений на лопастях гидротурбин от п датчиков канала через втулку рабочего колеса до коммутационного блока было проложено (п + 2) провода, а от коммутационного блока через токосъемник к измерительному мосту — всего два провода. Наличие в цепи датчика двух контактных переходов (в коммутационном блоке и в токосъемнике), а также возможные температурные изменения сопротивлений соединительных проводов здесь не сказывались вследствие их малого уровня в сравнении с уровнем полезных сигналов, получаемых от индуктивных датчиков давления.| Рис. 82. Принципиальные схемы включения индуктивных датчиков а — простейшего, б — типа ИКВ-22 |  |
На фиг. 160 дана принципиальная электрическая схема включения индуктивного датчика при использовании его в качестве путевого выключателя. Последовательно с катушкой датчика ДС включена катушка этажного реле Р. В случае применения этажного реле на постоянном токе включение его катушки производится через сухие выпрямители ВС (фиг. 160, а). При наличии реле переменного тока с высоким коэффициентом возврата надобность в сухих выпрямителях отпадает (фиг. 160,6). [c.291]
| Фиг. 161. Принципиальная схема включения индуктивных датчиков точной остановки. |  |
| Рис. 139. Схема включения индуктивного датчика в цепь регулировочной обмотки |  |
| Рис. 9. Электрические схемы включения индуктивных датчиков а—последовательная б — мостовая в — резонансная |  |
Рнс. 6.18. Принципиальная схема включения индуктивного датчика [c.182]
Перемещение стола станка на величину шага резьбы приводит ж такому же синусоидальному изменению тока в диагонали мостовой схемы, как и при использовании датчика с зубчатой линейкой. Дисбаланс мостовой схемы, в которую включен индуктивный датчик с катушками 3 и 4, устраняют поворотом винта 1. [c.39]
В отсчетном устройстве прибора (фиг. 166) установлена крупная шкала 1 диаметром 150 мм, позволяющая следить за показаниями прибора на некотором расстоянии от него. На шкале нанесено 120 делений с ценой 1 мк. По этой шкале перемещается центральная стрелка 2. На оси стрелки закреплена щетка 4. По окружности ободка шкалы установлены в требуемых местах контакты 3. При движении стрелки щетка 4 последовательно замыкает контакты 3 и подает команды на прекращение черновой подачи и включение чистовой, на выключение подачи и быстрый отвод круга. На оси стрелки закреплена также щетка 5, скользящая по реохорду 6, включенному в мостовую схему с индуктивным датчиком. [c.31]
Индуктивный датчик, включенный в схему моста, служит чувствительным элементом, выдающим напряжение переменного тока, пропорциональное вертикальному перемещению иглы.
Весьма перспективными устройствами для динамических измерений с емкостными и индуктивными датчиками являются приборы, в которых используются операционные усилители. Рассмотрим две схемы включения датчиков в операционный усилитель. [c.447]
Электромагнитные преобразователи (датчики) основаны на принципе преобразования перемещения или поворота в электрический сигнал с использованием изменения индуктивности или магнитного потока. Преобразователи, в которых перемещение преобразуется в изменение индуктивности обмотки, получили название индуктивных датчиков. Преобразователи, в которых перемещение преобразуется в изменение магнитного потока, как правило, во вторичных обмотках, получили название трансформаторных (взаимно-индукционных) датчиков. Поскольку схемы работы индуктивных и трансформаторных датчиков одинаковы, то рассмотрим две наиболее распространенные схемы включения (рис. 10.10, а, б) мостовую и дифференциальную соответственно. Электромагнитные преобразователи имеют ряд преимуществ по сравнению с устройствами других типов для съема показаний приборов, а именно надежность и относительную простоту конструкции высокую крутизну характеристики и достаточно большую мощность снимаемого сигнала малую зону нечувствительности (с помощью индуктивных датчиков можно замерять углы [c.592]
Схема включения простейшего индуктивного датчика приведена на рис. 82, а. Дроссель индуктивного датчика ДИ включен в цепь переменного тока последовательно с исполнительным токовым реле Р. Когда магнитная цепь датчика разомкнута, т. е. когда напротив П-об-разного сердечника нет магнитного шунта, индуктивное сопротивление датчика мало и исполнительное реле Р включено. Когда магнитный шунт, укрепленный на кабине, подходит к датчику, закрепленному в шахте, магнитная цепь датчика замыкается, его индуктивное сопротивление резко возрастает и исполнительное реле отключается вследствие уменьшения тока в цепи датчика. Работа индуктивного датчика не меняется, если дроссель датчика укреплен на кабине, а магнитный шунт — в шахте.
Момент трения при испытании измеряют при помощи индуктивных датчиков, которые включены по мостовой схеме с повышающими трансформаторами. Напряжение снимается со вторичных обмоток трансформаторов, выпрямляется германиевыми выпрямителями, собранными по мостовой схеме, и сравнивается на показывающем приборе УМ. С потенциометра, включенного последовательно с прибором УМ, снимается сигнал на самописец ЭПП-09. Разбаланс измерительного моста получается за счет изменения зазора между ярмом и сердечником индуктивного датчика. Перемещение сердечника происходит вследствие деформации упругого элемента. [c.191]
Разность высот изделия а у его концов измеряется при помощи двух независимых индуктивных датчиков 1 я 2, включенных по дифференциальной схеме через трансформатор 3. Измерительный прибор 4 регистрирует наличие конусности изделия а. [c.784]
На рис. 8.58 представлена принципиальная электрическая схема САУ размером статической настройки Л о при включении датчиков измерительного устройства в две автономные системы с целью компенсации погрешностей программоносителя (копира) относительно оси центров станка. Дифференциальные индуктивные датчики ДК и Д2 БВ-844) включены в мостовую схему, при этом датчик Д1 измеряет положение вершины резца. [c.615]
Электрическая схема (фиг. 38) пульта представляет собой мост, два плеча которого составляют катушки К и Кг индуктивного датчика. Катушки уравновешиваются сопротивлениями / з, и ю-В диагональ моста включен селеновый выпрямитель В, соединенный с гальванометром Г, шкала которого градуируется в микронах. [c.62]
Трехконтактная скоба с индуктивным датчиком (конструкция НИАТ) представлена на фиг. 32, а. На измерительный шток 1 скобы опирается шток 2 индуктивного датчика 3, закрепленного в верхней части корпуса устройства. Шток датчика перемещается вместе с якорем Я, размещенным между двумя индуктивными катушками 1 и Кг (фиг. 32, б). Индуктивные катушки совместно с омическими сопротивлениями образуют мост, в диагональ которого включен выпрямитель В. Показанная на фиг. 32,6 мостовая электрическая схема позволяет сбалансировать мост при двух различных положениях якоря Я датчика. Для этого включают сопротивление между плечами и (Rз моста. Благодаря этому достигается возможность отсчета по двум шкалам показывающего прибора 15, подключенного к выпрямителю Одна из шкал служит для отсчета при предварительной обработке, а вторая — при окончательной обработке детали. Переход со шкалы на шкалу производится включением дополнительного сопротивления и
Индуктивный датчик 7 представляет собой трансформатор с разомкнутой цепью, первичная обмотка которого питается током промышленной частоты с напряжением 5—7 в от стабилизатора. Напряжение, индуктируемое во вторичной обмотке, при постоянстве намагничивающих ампер-витков является функцией зазора 5 между полюсами датчика и деталью. Это напряжение подается к блоку измерительной схемы, на выходе которой включен показывающий прибор 2 магнитоэлектрической системы. По шкале прибора следят за изменением размера детали. [c.122]
При включении индуктивных датчиков в систему контрольных автоматов чаще всего применяют схему самобалансирующегося моста (фиг. 66). [c.552]На рис. 117 представлена блок-схема устройства ЭСУ-12. Звуковой генератор 2 питает током несущей частоты индуктивный датчик 1 и через выпрямитель 3 — датчик эталонных сигналов 4. Сигнал от датчика поступает на катодный повторитель 5 и через выпрямитель 6 — на прибор 7, который после соответствующего тарирования показывает величину стабилизируемой нагрузки или деформации. Катодный повторитель 5 служит для усиления сигнала датчика по мощности, выходное» напряжение катодного повторителя через, выпрямители 8 16 сподводится соответственно к схеме сравнения с эталонным напряжением. 9 (и далее через диодный ограничитель к мостовому усилителю постоянного напряжения 10) -, к включенным параллельно ограничителю максимума нагрузки 17 и через диодный ограничитель 18 — к ограничителю минимума нагрузки 19.
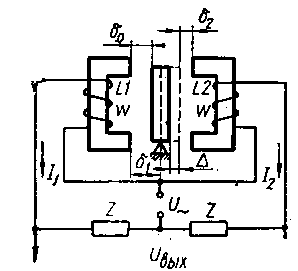
Основным элементом счетно-импульсной системы числового программного управления, определяющим точность ее работы, является датчик обратной связи. Датчики могут быть контактными, например, электроконтактиые, регистрирующие обороты и доли оборотов ходового винта, и бесконтактными. К последним относятся индуктивные датчики различных типов. Некоторое распространение в СССР получили индуктивные датчики с проходным якорем. Принцип действия такого датчика показан на рис. 97, а. Якорь 1 датчика закрепляется на исполнительном органе станка и вместе с ним перемещается по отношению к непод вижным сердечникам катушек Zi и включенных в измерительную мостовую схему (рис. 97, б). Недостатком датчика является значительное магнитное сопротивление, а следовательно, малая чувствительность, так как основной магнитный поток замыкается только по граням сердечников и якоря. Этот недостаток устраняют увеличением количества рабочих граней, т. е. созданием полюсных наконечников на сердечнике и якоре зубчатой формы [c.171]
Принципиальная схема прибора показана на рис. 2. Для питания индуктивного датчика высокочастотным напряжением в приборе имеется кварцевый генератор, выполненный на лампе 6Ж9П (лампа Л ). Повышенная стабильность генерируемы.х колебаний достигается применением в приборе вакуумного кварцевого резонатора с частотой 13 000 кгц. Кварцевый резонатор включен между управляющей сеткой и катодом лампы, обратная связь осуществляется за счет емкости анод — сетка лампы. [c.451]
Датчик представляет собой маятниковый отвес и две индуктивные катушки, включенные в мостовую схему. При наклоне датчика на некоторый угол изменяется положение корпуса вместе с катушками относительно маятника. Изменение относительного положения катушек и маятника приводит к разбалансу моста. Величину разбаланса определяют по стрелочному отсчетному y ipofi-ству, которое отградуировано в угловых величинах. [c.256]
Программа работы записана на ленте 1, пропускаемой через дешифратор 15. Перемещение программоносителя в дешифраторе синхронизировано с вращением двигателя 8 (т. е. с Ерашением стола 9). Сигналы, формируемые в дешифраторе, направляются в промежуточное запоминающее устройство 2. Последнее, интерполируя получаемые команды, преобразует их в сигналы, амплитуда которых пропорциональна требуемому перемещению салазок, и направляет эти сигналы в сравнивающее устройство 3. Сюда же поступают сигналы обратной связи от потенциометра 6. Сигнал, получаемый на выходе сравнивающего устройства, проходит через усилитель 4 к электродвигателю 5. Вал этого двигателя механически связан (на схеме механическая связь условно показана штриховой линией) с индуктивным датчиком 14а, включенным в плечо моста 14. Остальные плечи моста образуют индуктивности 14в, 14с и 14d. К зажимам моста подводится напряжение частотой 1 кгц. Когда мост окажется неуравновешенным, сигнал, появляющийся в его диагонали, через усилитель 13 направляется к электродвигателю 12, [c.149]
При деблокировании реле РВН отключаются реле РЗ и РУВ, а контактор В остается включенным через свой 3. контакт до срабатывания реле точной остановки РТО. Для спуска кабины с последовательными остановками на всех этажах назначения или вызова в схеме имеется дополнительное фетоэлектрическое устройство в виде фотореле замедления ФРЗ, фоторезистор которого размещен на шагающем поводке копираипарата и получает питание от плюсовой шины через 3. контакт реле РУН. При подходе к этажу назначения или вызова фоторезистор реле замедления ФРЗ засвечивается этажным тиратроном, а при срабатывании реле ФРЗ разрывается цепь питания реле большой скорости РЗ, контактор большой скорости В) отключается, а малой скорости (М) включается, переключая обмотки двигателя на малую скорость. При деблокировании реле РЗ его Р. контакт в цепи питания катушки контактора М замыкается, но реле РТО удерживается в возбужденном состоянии 3. контактом индуктивного датчика оста- [c.184]
Аналогичное по принципу действия устройство может быть использовано для отсчета угловых перемещений (рис. 111.23). Индуктивный датчик состоит из вращающейся шестерни 2 с внутренним зацеплением и неподвижных шестерен 1. Шест ерни 1 сидят на бронзовой втулке 5 и разделены бронзовой втулкой 4. В кольцевых пазах шестерен 1 расположены обмотки 3. Шестерни 1 представляют собой сердечники электромагнитов. Между зубьями шестерен 1 я 2 имеется небольшой зазор. Магнитные потоки Ф замыкаются через зубья шестерен, Зубья одной шестерни 1 смещены относительно зубьев второй шестерни 1 на половину шага. Таким образом, в то время как воздушный зазор между зубьями одной из шестерен 1 и шестерней 2 минимальный, зазор между зубьями второй из шестерен 1 и шестерней 2 — максимальный. При вращении шестерни 2 воздушные зазоры изменяются и соответственно изменяется индуктивное сопротивление обеих катушек. Катушки включены по схеме, которая используется для включения индуктивного проходного датчика с винтом. Число делений зависит от числа зубьев шестерен. [c.465]
Индуктивные датчики основаны на преобразовании линейных перемещений в изменение индуктивности катушки. Преимуществами индуктивного метода измерений являются непрерывность измерения возможность регистрации непрерывно изменяющихся величин, что необходимо при контроле параметров зубчатых колес, перемещений узлов станков и др. возможность отсчета действительных отклонений измеряемой-величины по шкале прибора дистанционность измерений высокая чувствительность и простота конструкции датчиков. Недостатками метода являются срайнительная сложность электрических схем включения датчиков и влияние отклонений параметров схемы на результаты измерения. [c.140]
Принципиальная схема рейтерных компенсационных динамометров полностью аналогична схеме, приведенной па рис. 88. Датчик перемещений вместе с сервомотором образует замкнутую систему автоматического регулирования, в которой регулируемым параметром является угловое положение рычага, а роль регулирующего органа выполняет ходовой винт с грузом (рейтером). В качестве датчиков перемещения чаще всего применяются индуктивные (трансформаторные) или контактные устройства. В системах с индуктивным датчиком для уменьшения колебаний рычага в системе управления предусматривается гибкая обратная связь, состоящая из индукционного тахогенератора, установленного на одном валу с сервомотором. В отличие от индуктивных датчиков, обеспечивающих непрерывное изменение скорости сервомотора от нуля до максимума, контактные датчики при включении сообщают сервомотору сразу некоторую конечную скорость. Недостатком весового элемента с контактным датчиком перемещения является склонность к автоколебаниям всей системы автоматического уравновешивания при увели-292 [c.292]
Индуктивные датчики типа ИКВ-21 предназначены для выполнения тех же функций, что и дат шки ИКВ-20. Недостатком схемы включения датчиков, в которых использовались реле постоянного тока, являлось применение селеновых выпрямителей. Датчики ИКВ-21 (см. фиг. 159) предусмотрены для работы непосредственно с реле переменного тока типа МКУ-48. Конструктивное их отличие от датчиков ИКВ-20 заключается в том, что внутрь корпуса встроены конденсаторы, которые ранее устанавливались на магнитной станции. В остальном конструкция датчика не изменилась, и он работает с магнитными шунтами типа СС-20 (табл. 49). Дополнительно разработан магнитный шунт длиной 2600 м.м. Датчики ИКВ-21 предусмотрены для питания напряжением переменного тока 220 в. Омическое сопротивление катушки 25 + 2,5 ом, импеданц без магнитного шунта = 950 + 50 ом, импеданц при нахождении магнитного шунта в дросселе — 1650 + 80 о.м. [c.423]
Познакомимся теперь с принципиальной электрической схемой отсчетно-командного устройства (фиг. 40, а). Обмотки катушек Их и Яг индуктивного датчика и сопротивления / 1 и / 2 образуют электрический мост, в измерительную диагональ которого включен реохорд 4 (реостат, свернутый в кольцо). Реохорд имеет обмотку из проволоки с высоким омическим сопротивлением. При перемещении якоря между катушками из-за изменения разности их сопротивлений в диагонали моста появляется неуравновешенное напряжение, или, как говорят, напряжение дисбаланса, которое поступает в электронный усилитель 1 и затем к небольшому серводвигателю 10. Вал серводвигателя поворачивается на угол, пропорциональный напряжению дисбаланса. Шкив его связан капроновой нитью с диском 3, несущим скользящий контакт 2 реохорда. Благодаря этому поворот вала серводвигателя вызывает поворот контакта реохорда, а следовательно, изменение величины активного сопротивления обмотки реохорда. Поворот контакта происходит до тех пор, пока мостовая схема не окажется уравновешенной. [c.74]
Генератор и усилитель прибора ИЭ-20 выполнены в одном блоке по схеме с электронной связью на одной лампе. В отличие от приборов типа ИЭ-1 и ИЭ-11 в данном приборе катушка компенсационного контура и катушка датчика включаются в параллельную резонансную цепь. Это объясняется тем, что рабочая частота прибора равна 6 Мгц. На такой частоте из-за собственной емкости кабеля между датчиком и прибором нельзя ирименить схему с последовательным включением индуктивности и емкости. Однако, несмотря на такое включение катушек контура и датчика, прибор отстраивается от влияния изменений зазора между датчиком и контролируемой поверхностью и может быть нечувствительным к зазорам до 250 мк. [c.374]
Регулятор мощности. Регулятор мощности — золотникового типа, с жесткой обратной связью непрямого действия с гидравлическим усилителем, который приводит в действие индуктивный датчик, включенный в систему возбуждения тягового генератора. Воздействуя на обмотку возбуждения тягового генератора, регулятор, при помощи электрической схемы создает внешнюю характеристику генератора, имеющую форму гиперболы. Управление частотой вращения коленчатого вала дизеля при объединенном регуляторе — дистанционное, электрогидравлнческое, с поста управления, при помощи рукоятки контроллера машиниста, имеющего пятнадцать фиксированных положений позиций. При переключении контроллера машиниста с одной позиции на другую подводится ток к электромагнитам, которые воздействуют на золотниковое устройство, регулирующее подачу масла к гидравлическому сервомотору управления. Под действием давления масла поршень 19 сервомотора управления перемещается вверх или вниз, сжимая или разжимая всережимную пружину регулятора, и тем,самым увеличивает или уменьшает частоту вращения коленчатого вала дизеля. [c.242]
Применение датчиков в промышленном оборудовании / Статьи и обзоры / Элек.ру
В промышленной электронике индуктивные, оптические и другие датчики применяются очень широко. Долго и постоянно имею с ними дело, так как работаю инженером-электронщиком на крупном предприятии. Статья будет обзорной, но есть и реальные примеры.

Типы датчиков
Итак, что вообще такое датчик. Датчик — это устройство, которое выдает определенный сигнал при наступлении какого-либо определенного события. Иначе говоря, датчик при определенном условии активируется, и на его выходе появляется аналоговый (пропорциональный входному воздействию) или дискретный (бинарный, цифровой, т.е. два возможных уровня) сигнал. Датчики могут называться также сенсорами или инициаторами.
Оптический датчик отслеживает перемещение |

Датчиков великое множество. Перечислю лишь те разновидности, с которыми приходится сталкиваться электрику и электронщику.
Индуктивные. Активируется наличием металла в зоне срабатывания. Другие названия — датчик приближения, датчик положения, индукционный, датчик присутствия, индуктивный выключатель, бесконтактный датчик или выключатель. Смысл один, и не надо путать. По-английски пишут «proximity sensor». Фактически это — датчик металла.
Оптические. Другие названия — фотодатчик, фотоэлектрический датчик, оптический выключатель. Такие применяются и в быту, называются «датчик освещенности». Разновидность оптических датчиков — инфракрасные датчики движения, которые срабатывают на изменение температуры в зоне действия.
Емкостные. Срабатывает на наличие практически любого предмета или вещества в поле активности.
Давления. Если этот датчик дискретный, то принцип работы очень прост. Давления воздуха или масла нет — датчик выдает сигнал на контроллер или рвет аварийную цепь. Может быть датчик для измерения давления с токовым выходом, ток которого пропорционален абсолютному давлению либо дифференциальному.
Пример работы концевых выключателей — нижний датчик активирован |
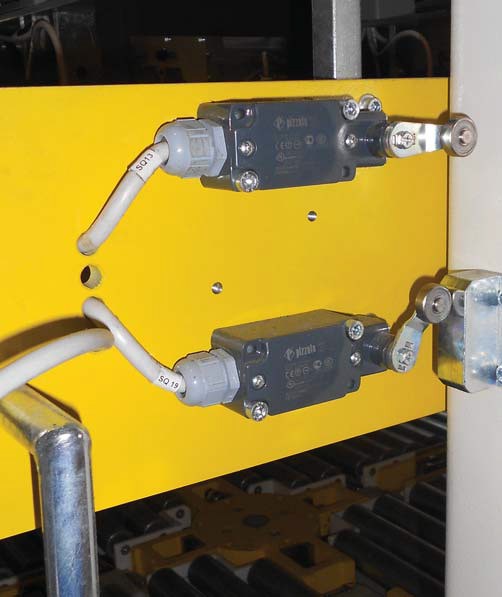
Концевые выключатели (электрический датчик). Это обычный пассивный выключатель, который срабатывает, когда на него надавливает объект (активатор).
Итак, мы выяснили, что воздействие (активация) может быть любым, а реакции может быть две — дискретный либо аналоговый сигнал. Поэтому, все датчики можно считать одинаковыми, различия могут быть только в способе активации (принципе действия) и схеме включения.
Для примера рассмотрим индуктивный датчик, поскольку он наиболее распространен.
Применение индуктивного датчика
Индуктивные датчики приближения применяются широко в промышленной автоматике, чтобы определить положение той или иной части механизма.
Сигнал с выхода датчика может поступать на вход контроллера, преобразователя частоты, реле, контактора или другого исполнительного устройства. Единственное условие — соответствие по току и напряжению.
Принцип работы индуктивного датчика
Индуктивный датчик является дискретным. Сигнал на его выходе появляется, когда в заданной зоне присутствует металл.
В основе работы датчика приближения лежит генератор с катушкой индуктивности. Отсюда и название. Когда в электромагнитном поле катушки появляется металл, это поле резко меняется, что влияет на работу схемы.
Металлический активатор меняет резонансную частоту колебательного контура и схема, содержащая компаратор, выдает сигнал на ключевой транзистор или реле. Нет металла — нет сигнала.
Чем отличаются индуктивные датчики
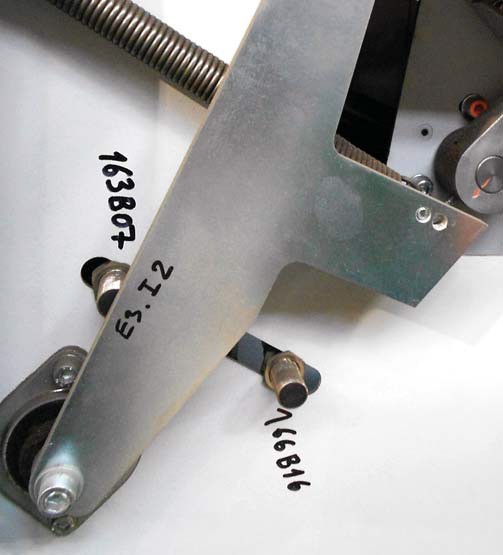
Индуктивные датчики определяют, в левом |
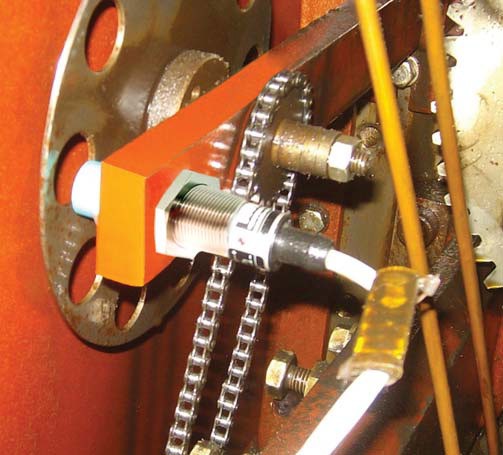
Индуктивный датчик подсчета импульсов |
Почти все, что сказано ниже, относится не только к индуктивным, но и к оптическим, емкостным и другим датчикам.
- Конструкция, вид корпуса.
Тут два основных варианта — цилиндрический и прямоугольный. Другие корпуса применяются крайне редко. Материал корпуса — металл (различные сплавы) или пластик.
- Диаметр цилиндрического датчика.
Основные размеры — 12 и 18 мм. Другие диаметры (4, 8, 22, 30 мм) применяются редко.
- Расстояние переключения (рабочий зазор).
Это то расстояние до металлической пластины, на котором гарантируется надежное срабатывание датчика. Для миниатюрных датчиков это расстояние — до 2 мм, для датчиков диаметром 12 и 18 мм — до 4 и 8 мм, для крупногабаритных датчиков — до 20…30 мм.
- Количество проводов для подключения.
2-х проводные. Датчик включается непосредственно в цепь нагрузки (например, катушка пускателя). Так же, как мы включаем дома свет. Удобны при монтаже, но капризны к нагрузке. Плохо работают и при большом, и при маленьком сопротивлении нагрузки. Нагрузку можно подключать в любой провод, для постоянного напряжения важно соблюдать полярность. Для датчиков, рассчитанных на работу с переменным напряжением — не играет роли ни подключение нагрузки, ни полярность. Главное — обеспечить рабочий ток.
3-х проводные. Наиболее распространены. Есть два провода для питания, и один — для нагрузки. Подробнее расскажу ниже.
4-х и 5-ти проводные. Такое возможно, если используется два выхода на нагрузку (например, PNP и NPN (транзисторные), или переключающие (реле). Пятый провод — выбор режима работы или состояния выхода.
- Виды выходов датчиков по полярности.
У всех дискретных датчиков может быть только 3 вида выходов в зависимости от ключевого (выходного) элемента.
Релейный. Реле коммутирует в простейшем случае один из проводов питания, как это делается в бытовых датчиках движения или освещенности. Универсальный вариант с «сухим» контактом, когда выходные контакты реле не связаны с питанием датчика. При этом обеспечивается полная гальваническая развязка, что является основным достоинством такой схемы. То есть, независимо от напряжения питания датчика, можно включать/выключать нагрузку с любым напряжением.
Транзисторный PNP. На выходе — транзистор PNP, то есть коммутируется «плюсовой» провод. К «минусу» нагрузка подключена постоянно.
Транзисторный NPN. На выходе — транзистор NPN, то есть коммутируется «минусовой», или нулевой провод. К «плюсу» нагрузка подключена постоянно.

Пример оптического датчика с релейным выходом
Можно четко усвоить разницу, понимая принцип действия и схемы включения транзисторов. Поможет такое правило: Куда подключен эмиттер, тот провод питания и коммутируется. Другой полюс подключен к нагрузке постоянно. Ниже будут даны схемы включения датчиков, на которых будет хорошо видно эти отличия.
- Виды датчиков по состоянию выхода.
Какой бы ни был датчик, один из основных его параметров — электрическое состояние выхода в тот момент, когда датчик не активирован (на него не производится какое-либо воздействие).
Выход в этот момент может быть включен (на нагрузку подается питание), либо выключен. Соответственно, говорят — нормально открытый (НО) контакт или нормально закрытый (нормально замкнутый, НЗ) контакт. В иностранном обозначении — NO и NC.
То есть, главное, что надо знать про транзисторные выходы датчиков — то, что их может быть 4 разновидности, в зависимости от полярности выходного транзистора и от исходного состояния выхода: PNP NO, PNP NC, NPN NO, NPN NC.
- Положительная и отрицательная логика работы.
Это понятие относится скорее к исполнительным устройствам, которые подключаются к датчикам (контроллеры, реле). Отрицательная или положительная логика относится к уровню напряжения, который активизирует вход.
Отрицательная логика: вход контроллера активизируется (логическая «1») при подключении к НУЛЮ. Клемму S/S контроллера (общий провод для дискретных входов) при этом необходимо соединить с +24 В. Отрицательная логика используется для датчиков типа NPN.
Положительная логика: вход активизируется при подключении к +24 В. Клемму контроллера S/S необходимо соединить с нулем. Используйте положительную логику для датчиков типа PNP. Положительная логика применяется чаще всего.
В следующей статье мы рассмотрим реальные индуктивные датчики и их схемы включения.
Автор: Александр Ярошенко, автор блога «СамЭлектрик»
Индуктивные датчики электромагнитного поля в схемах на МК
Переменные и пульсирующие электромагнитные поля создаются трансформаторами, дросселями, электродвигателями, реле переменного тока и т.д. Для их обнаружения, индикации и усреднённой оценки применяются различные приборы, втом числе содержащие индуктивные датчики.
Принцип работы датчиков электромагнитного поля заключается в регистрации электродвижущей силы (ЭДС), возникающей в катушке индуктивности при приближении к ней магнита или внесении её в магнитное поле. Физические явления здесь строго подчиняются закону электромагнитной индукции Фарадея.
Области применения индуктивных датчиков электромагнитного поля — искатели скрытой проводки, индикаторы короткозамкнутых витков, измерители магнитных полей вокруг трансформаторов и дисплеев, научные эксперименты (Рис. 3.63, а…м).
Рис. 3.63. Схемы подключения индуктивных датчиков электромагнитного поля к МК {начало):
а) /4/ — это датчик низкочастотного магнитного поля промышленной сети 50 Гц. Состоит он из катушки головного телефона, но без амбушюры и металлической мембраны;
б) /4/ — это датчик магнитного поля ультразвуковой частоты для исследования работы строчных трансформаторов телевизоров (15.625 кГц) или VGA-мониторов (31.25 кГц). Катушка датчика содержит 50 витков провода ПЭВ-0.23…0.31, намотанных на ферритовом стержне 200 х 10 мм. Конденсатор С/ подбирается до получения резонанса с индуктивностью катушки /4 7;
в)/4/ — это датчик магнитной составляюшей радиочастотного поля, возникаюшего, например, вблизи радиопередатчиков. Используется ферритовая антенна от обычного ДВ-, СВ- или КВ-радиоприёмника в зависимости от поставленной задачи;
г) в индуктивных датчиках могут возникать всплески напряжения, поэтому требуется защита входа МК, в частности, буферными элементами VD1, VT1\
д) индуктивный датчик перемещения. По мере введения металлического стержня в катушку трансформатора TI будет увеличиваться переменный сигнал 50 Гц во вторичной обмотке;
Рис. 3.63. Схемы подключения индуктивных датчиков электромагнитного поля к МК
{продолжение)’.
е) регистратор электромагнитных излучений от компьютерных дисплеев/кинескопов (I, = 10 мГн), флуоресцентных ламп (L, = 35 мГн), микроволновых печей (L, = 120 мГн). Катушка L/содержит 1200 витков провода ПЭВ-0.315, намотанных на металлическом болте 6×25 мм;
ж) МК подсчитывает число приближений внешнего магнита к катушке индуктивности датчика >4/(показано пунктиром). Резисторы /?желательно применить высокоточные;
з) подключение двухкатушечного гитарного звукоснимателя ЛI через усилитель-компрессор на специализированной микросхеме DAI фирмы Analog Devices. Схема универсальная и может применяться для компадирования сигналов не только в электрогитарах;
и) сигналы от датчика L1 проходят через активный ФНЧ DAL2 с частотой среза 3…4 кГц. Усиление задаётся резистором R5. Элемент Ж/. / формирует среднее напряжение +2.5 В;
Рис. 3.63. Схемы подключения индуктивных датчиков электромагнитного поля к МК
{окончание):
к)Л1 — это интегральный индуктивный датчик (фирма Speake & Со Llanfapley), изменяющий частоту выходного сигнала OUT под воздействием магнитного поля. Микросхема DA! служит преобразователем «частота — напряжение» на основе ФАПЧ (калибруется резистором R6)\ л) индуктивный датчик LI устанавливается вблизи двигателя или возле проводов, подводящих к нему питание. Чувствительности достаточно для регистрации тока 100 мА, при этом пиковое напряжение отдатчика составляет 10 мВ. Низкое энергопотребление устройства позволяет использовать для питания МК малогабаритную «трёхвольтовую» литиевую батарею;
м) «сенсорная» катущка L1 принимает импульсы, возникающие при образовании искры в свечах двигателя автомобиля. Для симметрии схемы выбирают равными R1 и R2, R4w R6.
Индуктивный датчик: достоинства и недостатки
Изменение индуктивности обмотки и сердечника, наступающее при изменении магнитного сопротивления, составляет основной принцип, на основании которого работает индуктивный датчик. Эти приборы широко применяются в промышленности, когда необходимо измерить различные перемещения. Область таких измерений находится в диапазоне 1 мкм – 20 мм.
С помощью датчика может измеряться расход жидкости или газа, уровни давления, действия силы и другие параметры. Для преобразования измеряемых параметров  используются различные чувствительные элементы, после чего все данные поступают непосредственно к датчику.
используются различные чувствительные элементы, после чего все данные поступают непосредственно к датчику.
Достоинства и недостатки
В качестве положительных характеристик, в первую очередь, следует отметить прочность и простоту конструкции, здесь полностью отсутствуют скользящие контакты. Данные приборы могут подключаться к любым источникам, имеющим промышленную частоту.
Отмечается и сравнительно большое значение выходной мощности, доходящей до нескольких десятков ватт. Все индуктивные датчики обладают повышенной чувствительностью.
Однако, для того, чтобы обеспечивалась точная работа прибора, необходимо питающее напряжение со стабильной частотой. Кроме того, нормальное функционирование возможно только при использовании переменного тока.
Виды и конструктивные особенности индуктивных датчиков
В зависимости от схемы индуктивные датчики могут быть одинарными или дифференциальными. Индуктивный датчик с одинарной схемой обладает одной измерительной ветвью, а в дифференциальном таких ветвей две. Таким образом, второй вариант дает возможность измерения индуктивности в двух катушках с одинаковыми параметрами.
Точность каждого прибора во многом зависит от степени погрешности с какой преобразуется тот или иной измеряемый параметр. Общая погрешность состоит из общей суммы всех имеющихся погрешностей.
Основной погрешностью датчика является нелинейность его характеристики, связанная с мультипликативной составляющей общей погрешности. С ее помощью происходит точное определение диапазона производимых измерений. В качестве случайной составляющей можно отметить температурную погрешность, существенно влияющую на работу. При неблагоприятных условиях, она может достичь достаточно большой величины.

На работу датчика могут оказывать свое влияние внешние электромагнитные поля, также дающие определенную погрешность измерений. Причиной их возникновения является индуцирование электродвижущей силы под действием внешних полей в обмотке датчика. Такие магнитные поля образуются от работы различных электроустановок на производственных участках.
Двухтактный индуктивный датчик. Мостовая схема.
Если в дифференциальной схеме рассматривалась разность токов в нагрузке, то в мостовой схеме следует рассматривать разность падений напряжений на плечах моста, которая определяет выходное напряжение двухтактного индуктивного датчика
где  ,
а
,
а .
.
Принцип действия мостовой схемы включения аналогичен принципу действия дифференциальной схемы. Выходное напряжение мостовой схемы в математической форме записи сводится к зависимости, подобной дифференциальной схеме, т. е.
 .
(2)
.
(2)
Используя (2), получим аналитическое описание статической характеристики двухтактного индуктивного датчика
 ,
,
которое будет
справедливо как для мостовой, так и для
дифференциальной схемы включения. Рассмотрим режим холостого хода в
предположении, что
сопротивления в плечах моста активные: Z = r. При  =
0 получаем
=
0 получаем ,
а, следовательно,Uвых= 0, так как
,
а, следовательно,Uвых= 0, так как  .
Перемещение якоря на величину
.
Перемещение якоря на величину вправо приводит к изменению зазоров
вправо приводит к изменению зазоров
 ;
;  ,
,
а это влечет за собой изменение индуктивностей плеч электрического моста:
 .
(3)
.
(3)
Для токов  и
и
 ,
(4)
,
(4)

 .
(5)
.
(5)
Из (3) следует, что
 .
.
Кроме
того, приращение  L можно представить в виде линейной
зависимости
L можно представить в виде линейной
зависимости
 L=
L= ,
,
так
как при малых изменениях зазора  функцияL
= f(
функцияL
= f( )
практически линейна (рис. 5). Тогда (5)
приводится к виду
)
практически линейна (рис. 5). Тогда (5)
приводится к виду

 .
(6)
.
(6)
Определим значение модуля разности токов, предварительно представив (6) в форме


 .
.
Отсюда

 ,
,
а модуль выходного напряжения, в соответствии с (2),
 .
(7)
.
(7)
Поскольку параметры, входящие в числитель и знаменатель выражения (7) постоянны, то дробь можно обозначить через некоторый коэффициент
 ,
(8)
,
(8)
называемый коэффициентом преобразования датчика, характеризующим его чувствительность. Таким образом, статическая характеристика двухтактного индуктивного измерительного преобразователя представляет собой функцию вида
 ,
(9)
,
(9)
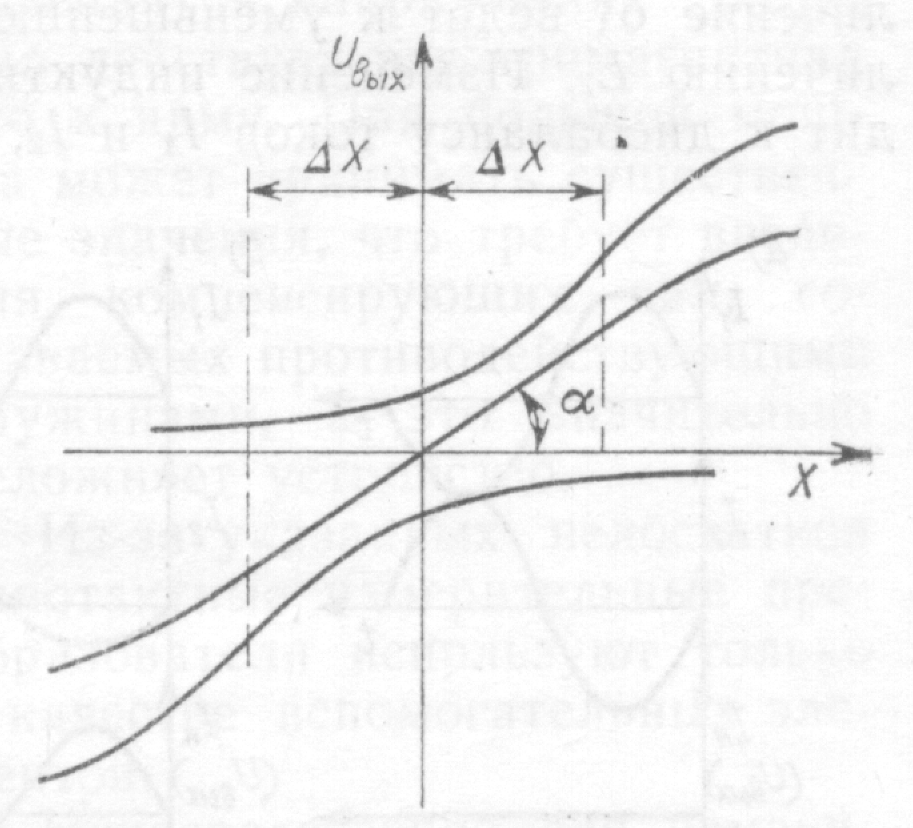
что
соответствует прямой, проходящей через
начало координат под углом  =arctg k к
оси абсцисс. Легко видеть, что при
изменении знака приращения входной
координаты
=arctg k к
оси абсцисс. Легко видеть, что при
изменении знака приращения входной
координаты  фаза выходного сигнала меняется на
противоположную. С некоторого значения
фаза выходного сигнала меняется на
противоположную. С некоторого значения реальная статическая характеристика
индуктивного датчика не совпадает с
линейной характеристикой (9) вследствие
того, что индуктивность одного из плеч
измерителя-преобразователя становится
малой, а индуктивное сопротивление
реальная статическая характеристика
индуктивного датчика не совпадает с
линейной характеристикой (9) вследствие
того, что индуктивность одного из плеч
измерителя-преобразователя становится
малой, а индуктивное сопротивление — соизмеримо с измерительным сопротивлениемr,
и поэтому появляется завал линейной
характеристики. В связи с этим значение
— соизмеримо с измерительным сопротивлениемr,
и поэтому появляется завал линейной
характеристики. В связи с этим значение  для реверсивных индуктивных датчиков
не должно превышать (0,3
для реверсивных индуктивных датчиков
не должно превышать (0,3 0,4)
0,4) . Чувствительность измерительного
преобразователя в соответствии с (8)
зависит от напряжения и частоты источника
питания, сопротивления нагрузки,
индуктивности дросселя и начального
зазора между ярмом и якорем.
С повышением
питающего напряжения чувствительность
датчика повышается, но это влечет за
собой увеличение его габаритов и массы. Уменьшение начального зазора
. Чувствительность измерительного
преобразователя в соответствии с (8)
зависит от напряжения и частоты источника
питания, сопротивления нагрузки,
индуктивности дросселя и начального
зазора между ярмом и якорем.
С повышением
питающего напряжения чувствительность
датчика повышается, но это влечет за
собой увеличение его габаритов и массы. Уменьшение начального зазора также приводит к повышению чувствительности
измерительного преобразователя, однако,
в целях предотвращения замыкания якоря
с ярмом накладываются ограничения на
минимальную величину зазора
также приводит к повышению чувствительности
измерительного преобразователя, однако,
в целях предотвращения замыкания якоря
с ярмом накладываются ограничения на
минимальную величину зазора ,
согласно которым последний должен быть
вдвое больше максимального хода якоря
,
согласно которым последний должен быть
вдвое больше максимального хода якоря = 2
= 2 max.
При прочих равных условиях максимальная
чувствительность двухтактного
индуктивного датчика имеет место при
равенстве индуктивного сопротивления
дросселя и активного сопротивления
нагрузки.
В этом случае (8) принимает
вид
max.
При прочих равных условиях максимальная
чувствительность двухтактного
индуктивного датчика имеет место при
равенстве индуктивного сопротивления
дросселя и активного сопротивления
нагрузки.
В этом случае (8) принимает
вид
 .
.
Следует отметить, что мостовая схема по сравнению с дифференциальной, имеет примерно в 2,8 раза меньшую относительную чувствительность при согласованной нагрузке. Разрешающая способность некоторых измерительных преобразователей при тщательной экранировке и балансировке схемы в нейтральном положении якоря составляет сотые доли микрометра.
Таким образом, одним из основных достоинств индуктивных преобразователей является возможность получения большой мощности преобразователя (до 1—5 В-А), что позволяет пользоваться сравнительно малочувствительным указателем на выходе измерительной цепи и регистрировать измеряемую переменную величину самописцем или вибратором осциллографа без предварительного усиления. Лишь при малогабаритных преобразователях приходится прибегать к включению усилителя между измерительной цепью и указателем или регистратором. Однако с увеличением выходной мощности возрастают габариты датчиков. Снижение габаритов достигается увеличением частоты, при этом входное усилие уменьшается. Но при больших значениях частоты начинают влиять межвитковые емкости, что затрудняет балансировку датчика в нейтральном положении. Двухтактные индуктивные измерительные преобразователи с плоскопараллельным воздушным зазором используются при измерении малых перемещений от долей микрометра до 3…5 мм.
Список использованной литературы:
2) Иванов, А.Г. Измерительные приборы в машиностроении: Учебное пособие для студентов приборостроительных специальностей вузов. – М.: Изд-во стандартов, 1981. – 496с., ил.
3) Богуславский, М.Г., Цейтлин, Я.М. Приборы и методы точных измерений длины и углов. М.: Изд-во стандартов, 1976.
4) Рабинович, А.Н. Приборы и системы автоматического контроля размеров деталей машин. Киев, Техника, 1970.
5) Кемпинский, М.М. Точность и надежность измерительных приборов. Л.: Машиностроение, 1972.
6) Городецкий, Ю.Г. Конструкции, расчет и эксплуатация измерительных инструментов и приборов.М.: Машиностроение, 1971.
7) Приборостроение и средства автоматизации. Справочник. Т. 1-5. М.: Машгиз; Машиностроение, 1963-1965.
Электрические средства измерения больших перемещений
Индуктивные датчики. Устройство, типы и виды индуктивных датчиков.
Индуктивные датчики применяются для преобразования в электрический сигнал небольших линейных и угловых перемещений. Простейший индуктивный датчик (называемый однотактным) представляет собой катушку индуктивности 1 с железным сердечником 2 и подвижным якорем З, отделенным от сердечника воздушным зазором (рис. 2-4). Катушка индуктивности с сердечником, называемая статором датчика, закрепляется неподвижно, а якорь соединяется механически с подвижной частью ОУ, перемещение которой нужно преобразовывать в электрический сигнал. При перемещении якоря изменяется сопротивление магнитной цепи датчика вследствие изменения воздушного зазора δ между статором и якорем (при вертикальном движении якоря) или площади воздушного зазора S (при горизонтальном движении якоря).
Сопротивление магнитной цепи датчика складывается из сопротивления участка цепи со сталью Rст и сопротивления участка цепи с воздушным зазором Rв. Магнитное сопротивление участка цепи со сталью:
Rст = Lст/(mст/Sст),
где Lст — суммарная длина средней магнитной силовой линии в стали сердечника и якоря; Sст — площадь поперечного сечения стального сердечника; mст — магнитная проницаемость материала сердечника и якоря.
Магнитное сопротивление участка цепи с воздушным зазором:
Rст = 2δ/(μоSв), где δ — длина воздушного зазора между статором и якорем датчика; μо — проницаемость воздуха; Sв — площадь поперечного сечения воздушного зазора. Так как μо>>μо, то Rст0 . сопротивление магнитной цепи датчика будет определяться в основном сопротивлением участка цепи с воздушным зазором:
Rм ≈ Rв = 2δ/(;μоSr)Переменный магнитный поток Ф, возникающий при подключении источника питания к катушке датчика, равен
Ф = Iω/Rмгде I — ТОК в цепи катушки датчика; w — число витков катушки датчика,w — число витков катушки датчика.
Индуктивность катушки датчика (если пренебречь потоком рассеяния):
L = ωФ/I = [ω2/2δ]μSФормула (2-1) устанавливает функциональную связь между перемещением якоря индуктивного датчика (при перемещении изменяется или d, или Sв) и индуктивностью катушки датчика.
У индуктивных датчиков с изменяющимся воздушным зазором статическая характеристика L=f(x) нелинейная (рис. 2-5, 1) и при больших зазорах (δ > 1 мм) чувствительность датчика уменьшается. Такие датчики используют при ограниченном диапазоне перемещения якоря — до 1 мм, а начальная рабочая точка выбирается в области характеристики, где она имеет наибольшую крутизну и приближается к линейной чувствительность датчиков с изменяющимся воздушным зазором высокая – до 0,2 мкм.
У индуктивных датчиков с изменяющейся площадью воздушного зазора статическая характеристика L=f(Sв) линейная, диапазон перемещения якоря шире — до 8 мм, но чувствительность меньше — до 0,3 мкм (рис. 2-5, 2). Изменение индуктивности катушки датчика L приводит к изменению ее индуктивного сопротивления: ХL = ωL, где ω — круговая частота питающего напряжения. Следовательно, происходит и изменение полного сопротивления катушки: Z = √Rа*2+XL*2, где Ra — активное сопротивление катушки датчика.
Ток I, протекающий в катушке датчика под действием приложенного переменного напряжения U, также изменяется при перемещении якоря и может служить выходным сигналом датчика (выходной характеристикой). Условно принцип работы индуктивных датчиков можно представить в виде цепи преобразований происходящих при перемещении якоря датчика (для датчиков с изменяющимся воздушным зазором):
x↑ → δ↑ → Rm↑ → Ф↓ → L↓ → Xl↓ → Z↓ → I↑Однотактные индуктивные датчики имеют высокую чувствительность и надежность, практически неограниченный срок службы, большую мощность выходного сигнала (до нескольких ватт), что позволяет в ряде случаев не применять усилитель. К недостаткам индуктивных датчиков следует отнести нереверсивность характеристики, небольшой диапазон перемещений якоря, наличие тока холостого хода и электромагнитной силы притяжения между якорем и статором, влияние колебаний амплитуды и частоты напряжения питания. Эти недостатки полностью или частично отсутствуют у дифференциальных индуктивных датчиков.
Дифференциальный индуктивный датчик
Он содержит два статора с катушками индуктивности L1 и L2 и один общий якорь. При перемещении якоря индуктивность одной катушки увеличивается, другой — уменьшается. Катушки индуктивности включаются или в дифференциальную измерительную схему, или как смежные плечи в мостовую измерительную схему.
Дифференциальные индуктивные датчики по сравнению с однотактными имеют более высокую точность преобразования и чувствительность. Статическая характеристика этих датчиков линейная и реверсивная.
Трансформаторные датчики
Они являются разновидностью индуктивных датчиков. Трансформаторный датчик можно рассматривать как трансформатор, у которого коэффициент трансформации изменяется за счет изменения коэффициента взаимоиндуктивности М между его обмотками. Такие датчики применяются для преобразования в электрический сигнал (напряжение переменного тока) небольших линейных и угловых перемещений.
На рис. 2-6 представлен дифференциальный трансформаторный датчик с угловым перемещением якоря. Первичная обмотка датчика ω1 расположена на центральном стержне сердечника 1 и подключена к источнику переменного тока. Вторичные обмотки ω2а и ω2б расположены на крайних стержнях и соединяются последовательно и встречно. Ток, протекающий по ω1 создает переменный магнитный поток Ф1, разветвляющийся на два потока: Ф1а и Ф1б. При симметричном положении якоря 2 по отношению к статору датчика (сердечник 1 с обмотками ω1, ω2а и ω2б) магнитные потоки равны: Ф1а=Ф1б=Ф1/2, и ЭДС, индуцирующиеся во вторичных обмотках, будут также равны: Е2а=Е2б.
Так как фазы этих ЭДС противоположны (за счет встречного включения обмоток ω2а и ω2б), то напряжение на выходе датчика будет равно нулю: Uвых = Е2а — Е2б=О. При повороте якоря, который механически связан с подвижной частью объекта управления, изменяются площади поперечного сечения воздушных зазоров и между якорем и крайними стержнями сердечника. В результате этого изменятся сопротивления RM1 и RM2 магнитных цепей потоков Ф1а и Ф1б, да и сами потоки: один из них увеличивается на ΔФ, а другой уменьшится на ΔФ. Индуцирующие во вторичных обмотках ЭДС Е2а и Е2б также изменятся пропорционально изменению потоков ФIа и Ф2б. На выходе датчика появится напряжение Uвых, амплитуда которого равна разности амплитуд ЭДС Е2а и Е2б: Uвых = Е2а-Е2б, а фаза выходного напряжения будет определяться фазой большей из ЭДС.
Таким образом, характеристика такого датчика будет реверсивной и линейной (в рабочей зоне). Чувствительность дифференциального трансформаторного датчика в два раза выше, чем у однотактного, рабочая зона в два раза больше, и при симметричном положении якоря выходное напряжение равно нулю. Точность преобразования у дифференциальных трансформаторных датчиков выше, так как ввиду симметричности конструкции и схемы датчика частично взаимно компенсируются погрешности от изменения окружающей температуры и частоты источника питания.