Емкостной сенсорный датчик, электрическая схема, печатная плата
Емкостной датчик – это один из типов бесконтактных датчиков, принцип работы которого основан на изменении диэлектрической проницаемости среды между двух обкладок конденсатора. Одной обкладкой служит сенсорный датчик схемы в виде металлической пластины или провода, а второй – электропроводящее вещество, например, металл, вода или тело человека.
При разработке системы автоматического включения подачи воды в унитаз для биде возникла необходимость применения емкостного датчика присутствия и выключателя, обладающих высокой надежностью, устойчивостью к изменению внешней температуры, влажности, пыли и питающему напряжению. Хотелось также исключить необходимость прикосновения человека с органами управления системы. Предъявляемые требования могли обеспечить только схемы сенсорных датчиков, работающих на принципе изменения емкости. Готовой схемы удовлетворяющей необходимым требованиям не нашел, пришлось разработать самостоятельно.
Получился универсальный емкостной сенсорный датчик, который не требует настройки и реагирует на приближающиеся электропроводящие предметы, в том числе и человека, на расстояние до 5 см. Область применения предлагаемого сенсорного датчика не ограничена. Его можно применять, например, для включения освещения, систем охранной сигнализации, определения уровня воды и в многих других случаях.
Электрические принципиальные схемы
Для управления подачей воды в биде унитаза понадобилось два емкостных сенсорных датчика. Один датчик нужно было установить непосредственно на унитазе, он должен был выдавать сигнал логического нуля при присутствии человека, а при отсутствии сигнал логической единицы. Второй емкостной датчик должен был служить включателем воды и находиться в одном из двух логических состояний.
При поднесении к сенсору руки датчик должен был менять логическое состояние на выходе – из исходного единичного состояния переходить в состояние логического нуля, при повторном прикосновении руки из нулевого состояния переходить в состояние логической единицы. И так до бесконечности, пока на сенсорный включатель поступает разрешающий сигнал логического нуля с сенсорного датчика присутствия.
Схема емкостного сенсорного датчика
Основой схемы емкостного сенсорного датчика присутствия является задающий генератор прямоугольных импульсов, выполненный по классической схеме на двух логических элементах микросхемы D1.1 и D1.2. Частота генератора определяется номиналами элементов R1 и C1 и выбрана около 50 кГц. Значение частоты на работу емкостного датчика практически не влияет. Я менял частоту от 20 до 200 кГц и влияния на работу устройства визуально не заметил.
С 4 вывода микросхемы D1.2 сигнал прямоугольной формы через резистор R2 поступает на входы 8, 9 микросхемы D1.3 и через переменный резистор R3 на входы 12,13 D1.4. На вход микросхемы D1.3 сигнал поступает с небольшим изменением наклона фронта импульсов из-за установленного датчика, представляющего собой кусок провода или металлическую пластину. На входе D1.4, из за конденсатора С2, фронт изменяется на время, необходимое для его перезаряда. Благодаря наличию подстроечного резистора R3, есть возможность фронты импульса на входе D1.4, выставить равным фронту импульса на входе D1.3.

Если приблизить к антенне (сенсорному датчику) руку или металлический предмет, то емкость на входе микросхемы DD1.3 увеличится и фронт поступающего импульса задержатся во времени, относительно фронта импульса, поступающего на вход DD1.4. чтобы «уловить» эту задержку про инвертированные импульсы подаются на микросхему DD2.1, представляющую собой D триггер, работающий следующим образом. По положительному фронту импульса, поступающего на вход микросхемы C, на выход триггера передается сигнал, который в тот момент был на входе D. Следовательно, если сигнал на входе D не изменяется, поступающие импульсы на счетный вход C не оказывают влияния на уровень выходного сигнала. Это свойство D триггера и позволило сделать простой емкостной сенсорный датчик.
Когда емкость антенны, из за приближения к ней тела человека, на входе DD1.3 увеличивается, импульс задерживается и это фиксирует D триггер, изменяя свое выходное состояние. Светодиод HL1 служит для индикации наличия питающего напряжения, а HL2 для индикации приближения к сенсорному датчику.
Схема сенсорного включателя
Схему емкостного сенсорного датчика можно использовать и для работы сенсорного включателя, но с небольшой доработкой, так как ему необходимо не только реагировать на приближение тела человека, но и оставаться в установившемся состоянии после удаления руки. Для решения этой задачи пришлось к выходу сенсорного датчика добавить еще один D триггер, DD2.2, включенный по схеме делителя на два.
Схема емкостного датчика была немного доработана. Для исключения ложных срабатываний, так как человек может подносить и удалять руку медленно, из-за наличия помех датчик может выдавать на счетный вход D триггера несколько импульсов, нарушая необходимый алгоритм работы включателя. Поэтому была добавлена RC цепочка из элементов R4 и C5, которая на небольшое время блокировала возможность переключение D триггера.

Триггер DD2.2 работает так же, как и DD2.1, но сигнал на вход D подается не с других элементов, а с инверсного выхода DD2.2. В результате по положительному фронту импульса, приходящего на вход С сигнал на входе D изменяется на противоположный. Например, если в исходном состоянии на выводе 13 был логический ноль, то поднеся руку к сенсору один раз, триггер переключится и на выводе 13 установится логическая единица. При следующем воздействии на сенсор, на выводе 13 опять установится логический ноль.
Для блокировки включателя при отсутствии человека на унитазе, с сенсора на вход R (установка нуля на выходе триггера вне зависимости от сигналов на всех остальных его входах) микросхемы DD2.2 подается логическая единица. На выходе емкостного выключателя устанавливается логический ноль, который по жгуту подается на базу ключевого транзистора включения электромагнитного клапана в Блоке питания и коммутации.Резистор R6, при отсутствии блокирующего сигнала с емкостного датчика в случае его отказа или обрыва управляющего провода, блокирует триггер по входу R, тем самым исключает возможность самопроизвольной подачи воды в биде. Конденсатор С6 защищает вход R от помех. Светодиод HL3 служит для индикации подачи воды в биде.
Конструкция и детали емкостных сенсорных датчиков
Когда я начал разрабатывать сенсорную систему подачи воды в биде, то наиболее трудной задачей мне казалась разработка емкостного датчика присутствия. Обусловлено это было рядом ограничений по установке и эксплуатации. Не хотелось, чтобы датчик был механически связан с крышкой унитаза, так как ее периодически надо снимать для мойки, и не мешал при санитарной обработке самого унитаза. Поэтому и выбрал в качестве реагирующего элемента емкость.
Сенсорного датчика присутствия
По выше опубликованной схеме сделал опытный образец. Детали емкостного датчика собраны на печатной плате, плата размещена в пластмассовой коробке и закрывается крышкой. Для подключения антенны в корпусе установлен одноштырьковый разъем, для подачи питающего напряжения и сигнала установлен четырех контактный разъем РШ2Н. Соединена печатная плата с разъемами пайкой медными проводниками в фторопластовой изоляции.

Сенсорный емкостной датчик собран на двух микросхемах КР561 серии, ЛЕ5 и ТМ2. Вместо микросхемы КР561ЛЕ5 можно применить КР561ЛА7. Подойдут и микросхемы 176 серии, импортные аналоги. Резисторы, конденсаторы и светодиоды подойдут любого типа. Конденсатор С2, для стабильной работы емкостного датчика при эксплуатации в условиях больших колебаниях температуры окружающей среды нужно брать с малым ТКЕ.
Установлен датчик под площадкой унитаза, на которой установлен сливной бачок в месте, куда в случае протечки из бачка вода попасть не сможет. К унитазу корпус датчика приклеен с помощью двустороннего скотча.

Антенный датчик емкостного сенсора представляет собой отрезок медного многожильного провода длинной 35 см в изоляции из фторопласта, приклеенного с помощью прозрачного скотча к внешней стенке чаши унитаза на сантиметр ниже плоскости очка. На фотографии сенсор хорошо виден.

Для настройки чувствительности сенсорного датчика необходимо после его установки на унитаз, изменяя сопротивление подстроечного резистора R3 добиться, чтобы светодиод HL2 погас. Далее положить руку на крышку унитаза над местом нахождения сенсора, светодиод HL2 должен загораться, если руку убрать, потухнуть. Так как бедро человека по массе больше руки, то при эксплуатации сенсорный датчик, после такой настройки, будет работать гарантировано.
Конструкция и детали емкостного сенсорного включателя
Схема емкостного сенсорного включателя имеет больше деталей и для их размещения понадобился корпус большего размера, да и по эстетическим соображениям, внешний вид корпуса, в котором был размещен сенсорный датчик присутствия не очень подходил для установки на видном месте. Внимание на себя обратила настенная розетка rj-11 для подключения телефона. По размерам она подходила и имела хороший внешний вид. Удалив из розетки все лишнее, разместил в ней печатную плату емкостного сенсорного выключателя.

Для закрепления печатной платы в основании корпуса была установлена короткая стойка и к ней с помощью винта прикручена печатная плата с деталями сенсорного выключателя.

Датчик емкостного сенсора сделал, приклеив ко дну крышки розетки клеем «Момент» лист латуни, предварительно вырезав в них окошко для светодиодов. При закрывании крышки, пружина (взята от кремниевой зажигалки) соприкасается с латунным листом и таким образом обеспечивается электрический контакт между схемой и сенсором.

Крепится емкостной сенсорный включатель на стену с помощью одного самореза. Для этого в корпусе предусмотрено отверстие. Далее устанавливается плата, разъем и закрепляется защелками крышка.

Настройка емкостного вык
Детектор наличия человека в туалете / Habr
Люблю, когда освещение включается автоматически, поэтому стараюсь автоматизировать это везде, где только можно. В коридоре это делается элементарно — датчиком движения. В кладовке можно просто включать свет, когда открыта дверь.Как же сделать это в туалете? Когда человек сидит на унитазе, особого движения нет, свет будет гаснуть, да дверь обычно за собой закрывают. Передо мной встала задача — создать устройство, которое будет определять, что на унитазе сидит человек, либо что кто-то вообще находится в туалете.
Решение оказалось достаточно очевидным — оптопары. С одной стороны туалета можно повесить инфракрасные светодиоды, а с другой — фотодиод(ы). Правда, последних у меня в наличии не оказалось, зато завалялась целая куча ДУ-приёмников TSOP 1736, которые я уже где только не применяю. Использовать эти приёмники достаточно просто, они имеют всего три вывода: земля, питание и выход. Если подать на него питание, на выходе будет 5 вольт, но если при этом где-то поблизости инфракрасный светодиод мигает с частотой в 36кГц, то на выходе будет ноль.
Задача свелась к следующему: мигать по очереди светодиодами, проверять, видит ли ДУ-приёмник сигнал, и если не видит (что-то его загородило), то включать свет через реле. Оставалось собрать устройство, которое будет всё это делать. Я быстренько набросал плату:
Всё достаточно просто. Используется микроконтроллер ATMEGA8. Справа разъём для подключения программатора (сеть и возможность удалённо обновлять прошивку тут не нужны, пожалуй). Сверху контакты для подключения ДУ-приёмника и ИК-светодиодов. Слева зажимы — вход 220 вольт и выход на лампу. Чуть правее реле, которое включается через транзистор, не забываем воткнуть в обратку диод. Чуть правее центра три светодиода для удобства отладки. Блок питания я решил использовать готовый, разломал для этого зарядку от Нокии.
В итоге получилось такое устройство:
Однако, самое сложное оказалось впереди. Во-первых, светодиоды нужно было правильно расположить, чтобы линии между ними и ДУ-приёмником проходили именно там, где обычно находится человек. С сидячим положением вопросов не было, но мне никогда раньше не приходилось задумываться — в какой именно точке я стою, когда писаю? Это как в анекдоте про профессора и бороду — пока не думаешь об этом, всё просто. Пришлось провести несколько экспериментов, писая незадумываясь перемещая светодиоды, в итоге была найдена идеальная комбинация:
При таком раскладе, как бы я ни вставал, один из лучей всегда пересекается, а в сидячем положении пересекаются все три.
Второй проблемой оказалось то, что светодиоды весьма яркие, если можно так сказать относительно инфракрасного света, а плитка на стенах хорошо отражает лучи. В результате ДУ-приёмник видел сигнал, даже если закрывать светодиоды ладонью. Нужно было понизить их яркость, при чём индивидуально и желательно без изменения схемы, т.е. программным путём. Увы, уменьшить ток таким образом проблемно, но оказалось, что на дальнобойности сильно сказывается скважность мигания.
Сверху — обычный сигнал, когда светодиод мигает 36000 раз в секунду, а снизу сигнал, который будет регистрироваться ДУ-приёмником только с более близкого расстояния. При этом частота остаётся той же — 36кГц, но время, в течении которого светодиод горит становится меньше.
Опытным путём были подобраны идеальные значения для каждого из светодиодов. Я себя чувствовал в весьма дурацкой ситуации, сидя с ноутбуком и программатором в туалете. В результате всё работает так, что достаточно малейшего объекта, чтобы полностью загородить каждый из лучей, но и ложных срабатываний при этом не бывает. Свет выключается спустя всего-то 15 секунд. На случай, если вдруг что-то пойдёт не так, свет не будет гореть более 15 минут. Повод там не засиживаться.
Все провода аккуратно спрятал в короба:
Так в доме появилось ещё одно маленькое удобство. Купить бы ещё японский унитаз, и будет полная гармония 🙂
upd: Комментарии показывают, что выбор технологии сильно зависит от индивидуальных требований: у одних есть коты, у других нет, у одних дверь открывается наружу, у других внутрь. У кого-то есть дети. Кто-то сидит в туалете без движения по 15 минут. Ну а кто-то писает сидя, в конце концов 🙂 Мной был выбран метод, который мне было интереснее всего реализовать.
Пост был воспринят гораздо серьёзнее, чем я ожидал. Я писал его с немалой долей юмора — с серьёзным видом рассказать о какой-то ерунде.
Радиосхемы. — Датчик присутствия
Охранное и шпионское оборудование своими руками
материалы в категории
Еще одна схема, подобная описанной в статье Чуствительное емкостное реле срабатывающая на постороннее присутствие в охраняемой зоне.
Принцип работы устройства основан на так называемом эффекте Доплера: изменение частоты и длины волн, регистрируемых приёмником, вызванное движением их источника и/или движением приёмника.
Устройство имеет собственный генератор и антенну. Пока в зоне действия антенны нет отражающего сигнала, то устройство находится в ждущем режиме. Если в охраняемой зоне появляется посторонний объект, то сигнал, отраженный от него принимается в искаженном виде что вызовет срабатывание устройства.
Практически свой собственный радар!!
Схема датчика присутствия
Датчик состоит из СВЧ генератора на транзисторе КТ371 (КТ368), предварительного усилителя на транзисторе КТ3102 (КТ315) и компаратора на микросхеме К554СА3.
СВЧ сигнал, вырабатываемый генератором, излучается штыревой антенной и после отражения от движущегося объекта получает сдвиг по частоте, равный DFотр = 2*V*Fизл/C, где V √ скорость движения объекта, С √ скорость света, F √ частота передачи.
Отраженный от объекта сигнал принимается той же самой антенной и в СВЧ генераторе, который в этом случае работает как приемник прямого преобразования, преобразуется в сигнал низкой (инфразвуковой) частоты.
Фактически генератор работает как автодин. Полученные низкочастотные колебания усиливаются предварительным усилителем и далее в компараторе преобразуются в прямоугольные импульсы. При отсутствии отраженных сигналов напряжение на выходе компаратора имеет высокий уровень.
Подстроечный конденсатор в схеме СВЧ генератора служит для установления частоты, равной резонансной частоте антенны (подбирается по максимуму чувствительности датчика).
Конструктивно датчик выполнен на печатной плате из стеклотекстолита и расположен в пластмассовом корпусе, антенна (отрезок жесткого провода) припаяна к контактной площадке платы и через отверстие в корпусе выходит наружу. Рекомендуемое расположение антенны √ вертикальное. Непосредственно возле датчика не должно быть экранирующих предметов.
Емкостные датчики. Виды и устройство. Работа и применение
Емкостные датчики – преобразователи параметров. Их работа заключается в изменении емкостного сопротивления путем изменения измеряемого параметра. Емкостный датчик преобразовывает такие величины, как влажность, давление, сила механического воздействия, уровень жидкости в изменение электрической емкости.
Классификация
По исполнению датчики делятся на:
- Одноемкостные.
- Двухъемкостные.
Одноемкостнй датчик имеет простое устройство и выполнена в виде конденсатора с изменяемой емкостью. Его недостатком является большое влияние внешних воздействий. К ним относятся температура и влажность. Чтобы компенсировать такие неточности, применяют дифференциальные двухъемкостные модели.
В отличие от одноемкостных датчиков, минусом дифференциальных моделей является то, что требуется минимум три соединительных экранированных проводника между измерительным устройством и датчиком, для погашения паразитных емкостей. Однако это компенсируется стабильностью, значительным увеличением точности и расширением сферы использования таких датчиков.
Иногда трудно спроектировать дифференциальный датчик емкостного типа из соображений его устройства. Особенно, если это датчик с изменяемым зазором. Но при расположении образцового конденсатора вместе с рабочим, и выполнении их конструкции одинаковыми, включая все материалы, то будет создана намного меньшая чувствительность устройства к наружному воздействию различных факторов. В этих случаях идет речь о полудифференциальной модели, относящейся к 2-х емкостным приборам.
Специфическая особенность параметра выхода двухъемкостных датчиков, представленная в виде безразмерного соотношения 2-х емкостей, позволяет назвать такие устройства датчиками отношения.
Линейные датчики
Неэлектрические параметры, которые требуется измерять на практике, очень разнообразны и многочисленны. На базе конденсатора, у которого равномерно распределено электрическое поле в рабочем промежутке, создаются устройства емкостных датчиков перемещения следующих видов:
- С изменяемой площадью электродов.
- С изменяемым промежутком между обкладками.
Датчики с переменной площадью удобнее для контроля значительных перемещений, а датчики с изменяемым промежутком удобнее для контроля незначительных перемещений.
Датчики угловых перемещений имеют принцип работы, аналогичный линейным датчикам. При этом эти датчики также рекомендуются для малых интервалов перемещений угла. Для таких целей часто используют в эксплуатации многосекционные модели с изменяемой площадью пластин.
Подобные датчики имеют крепление одного электрода на валу контролируемого объекта. При угловом смещении вала изменяется площадь пластин конденсатора, что приводит к изменению емкости. Это изменение обрабатывается электронной схемой.
Инклинометры
Другими словами такое устройство называют датчиком крена. Они получили название инклинометров, выполнены в виде дифференциального емкостного датчика наклона. Эта конструкция имеет чувствительный компонент в виде капсулы.
Чувствительная капсула включает в себя подложку с планарными электродами (1), которые покрыты диэлектрическим слоем, а также корпус (2), герметично зафиксированный на подложке. Частично внутренняя часть корпуса заполнена токопроводящей жидкостью (3). Она является общим выводом чувствительного компонента.
Общий электрод создает с электродами своеобразный дифференциальный конденсатор. Сигнал выхода датчика прямо зависит от размера емкости, которая зависит от расположения корпуса.
Инклинометр сконструирован с линейной зависимостью сигнала выхода от угла наклона в рабочей плоскости и не меняет значения в нерабочей плоскости. В этом случае сигнал имеет незначительную зависимость от изменения температуры. Чтобы определить расположение плоскости применяется два инклинометра, находящихся между собой под прямым углом.
Инклинометры небольшого размера с сигналом, зависящим от угла наклона датчика, нашли применение совсем недавно. Они имеют высокую точность, малые габариты, у них нет движущихся деталей. Стоимость их также невысока. Все эти достоинства позволяют рекомендовать их для применения датчиками наклона, а также для замены угловых датчиков, в том числе и на движущихся объектах.
Датчики уровня токонепроводящих веществ, находящихся в жидком состоянии, представляют собой схему из двух соединенных параллельно емкостей. Они стали популярными в различных отраслях, системах проверки, при работе с сыпучими и вязкими материалами, в условиях конденсата.
Датчики давления
Конструкция таких датчиков отличается устройством преобразователя. Он выполнен в виде воздушного конденсатора. Одна его пластина является неподвижной, а вторая передвигается под воздействием упругого преобразователя.
Устройство и работа
1 — Корпус датчика обеспечивает возможность установки выключателя, защиту от внешних воздействий различных факторов. Материалом корпуса обычно является полиамид или латунь. В комплект входят крепежные изделия.
2 — Компаунд, состоящей из специальной смолы, создает защиту элементов датчика от попадания влаги и других посторонних веществ.
3 — Триггер создает необходимую крутизну сигнала коммутации и величину гистерезиса.
4 — Подстроечный элемент.
5 — Светодиод обеспечивает оперативность настройки, показывает положение выключателя.
6 — Усилитель повышает сигнал выхода до требуемой величины.
7 — Демодулятор модифицирует изменение колебаний высокой частоты в изменение напряжения.
8 — Генератор создает электрическое поле для воздействия на объект.
9 — Электроды.
Рабочая поверхность датчика выполнена в виде двух металлических электродов. Они играют роль обкладок конденсатора, которые подключены в цепь обратной связи автогенератора высокой частоты. Генератор настроен на приближение объекта к активной поверхности.
При приближении контрольного объекта он меняет емкость, вследствие чего генератор вступает в работу и образует колебания с увеличивающейся амплитудой по приближению к объекту. Повышение амплитуды обрабатывается электронной схемой, которая создает сигнал выхода.
Емкостные датчики приводятся в действие от электропроводных объектов и диэлектриков. При приближении токопроводящих объектов расстояние срабатывания Sr значительно больше, чем при воздействии диэлектриков. Расстояние срабатывания снижается, и зависит от диэлектрической проницаемости диэлектрика Er.
Особенности конструкции
Чаще всего емкостные датчики выполняются в виде цилиндрического или плоского конденсатора. Подвергаемое контролю перемещение испытывает одна обкладка. При этом она создает изменение емкости, которая выражается:
где ε является диэлектрической проницаемостью материала, d – зазор, S – площадь пластин.
Емкостные датчики способны работать при замере разных параметров по трем направлениям, зависящим от связи контролируемой величины с параметрами:
- Переменным расстоянием между пластинами.
- Площадью перекрытия пластин.
- Изменяемой диэлектрической проницаемости материала.
В случае с диэлектрической проницаемостью входным параметром будет состав, который заполняет объем между обкладками. Такие емкостные датчики стали популярными при контроле размеров малых объектов, влажности тел.
Достоинства
Емкостные датчики имеют множество преимуществ в отличие от других видов. К ним можно отнести:
- Форма датчика легко совмещается с разными конструкциями и поставленными задачами.
- Не требуется больших усилий для передвижения чувствительного компонента.
- Длительная эксплуатация.
- Отсутствие подвижных контактов.
- Повышенная чувствительность.
- Малый расход электроэнергии.
- Небольшие габаритные размеры и масса.
- Технологичность при изготовлении, применение дешевых материалов и веществ.
Емкостные датчики славятся своей простой конструкцией, что дает возможность создания надежных и прочных устройств. Свойства конденсатора зависят всего лишь от геометрических параметров, и не имеют зависимости от свойств применяемых материалов, при условии их правильного подбора. Поэтому при проектировании пренебрегают влиянием температуры на площадь поверхности и размера между пластинами, при правильном выборе изоляции и металла.
Недостатки
- Работа на высокой частоте.
- Повышенные требования к экранированию элементов.
- Малый коэффициент преобразования.
При использовании емкостных датчиков необходимо обеспечивать защиту от ложных сработок. Они возникают из-за случайного касания работника, атмосферными осадками, различными жидкостями.
Применение
Емкостные датчики используются в разных сферах производства и деятельности человека. Они применяются в управлении технологическими процессами и системах регулировки во всех промышленных производствах. Сегодня наиболее популярными датчиками стали датчики присутствия, которые являются надежными конструкциями. Они имеют невысокую цену, и широкий спектр направлений по использованию.
Основными областями применения датчиков стали:
- Подсчет штучного товара.
- Регулировка натяжения конвейера.
- Сигнализация обрыва проводника при намотке.
- Контроль наполнения упаковки.
- Сигнализация при заполнении стеклянных и пластиковых сосудов.
Похожие темы:
Ёмкостный датчик — Википедия
Материал из Википедии — свободной энциклопедии
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 5 декабря 2013; проверки требуют 5 правок. Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 5 декабря 2013; проверки требуют 5 правок. Емкостный сенсорный экран смартфоновЁмкостный датчик — преобразователь параметрического типа, в котором изменение измеряемой величины преобразуется в изменение ёмкости конденсатора.[1]
Специальная схема преобразует изменение ёмкости в пороговый сигнал датчика (например сухой контакт). В простейших датчиках это обычно мультивибратор, преобразователь «частота (или скважность)-напряжение» и компаратор. Иногда, если изменение ёмкости в ответ на воздействие невелико, приходится ставить схемы на микроконтроллерах, которые занимаются автоподстройкой чувствительности и нуля датчика.
Ёмкостные датчики получили широкое распространение там, где необходимо контролировать появление слабопроводящих жидкостей, например воды. Это датчики уровня жидкости, датчики дождя в автомобилях, датчики в сенсорных кнопках на бытовой технике (в живых тканях много воды) и т. п.
Существуют также ёмкостные датчики уровня жидкости, широко используемые для измерения количества топлива на летательных аппаратах. Обычно датчик представляет собой пару вставленных друг в друга металлических цилиндров (иногда сложной формы, чтобы обеспечить линейность характеристики датчика при сложной форме бака), погруженных в топливо. Принцип действия датчиков основан на том, что ёмкость прямо пропорциональна диэлектрической проницаемости изолятора, а ε у воздуха и топлива различается (порядка 1 и 1,8 соответственно). В результате при заполнении бака топливом возрастает реактивное сопротивление датчика. Питаются ёмкостные топливомеры, как правило, от общей сети ЛА напряжением 115 В частотой 400 Гц, которое для питания датчиков понижается.
Основные преимущества ёмкостных датчиков: высокий порог чувствительности и небольшая инерционность. Основные недостатки: сильное влияние внешних электромагнитных полей.[2]
Специфическая разновидность датчиков — сенсорные экраны на ёмкостном принципе.
Сравнение индуктивных и ёмкостных датчиков положения
Автор: Mark Howard, Zettlex UK Ltd
Ссылка на оригинал: technical articles/inductive vs. capacitive_rev4.0
Перевод на русский язык подготовлен компанией АВИ Солюшнс.
Введение
Некоторые индуктивные и ёмкостные датчики выглядят очень похоже и неудивительно что инженеры-разработчики бывают сбиты с толку их сходством. И те и другие являются бесконтактными датчиками положения и построены на основе печатных плат. Тем не менее, физические принципы, лежащие в основе каждого типа датчиков, достаточно различны. В конечном итоге на практике это означает, что эти типы датчиков подходят для различных приложений. Эта статья объясняет физические принципы каждой технологии и сравнивает соответственно сильные и слабые стороны каждого подхода.
Принцип работы – Ёмкостные датчики
Когда исследователя Эвальда Юргена фон Клейста ударило электрическим током от лабораторного прибора в 1745 году, он внезапно понял, что есть возможность сохранять электрический заряд в больших количествах. Возможно, ненамеренно он построил первый в мире конденсатор. Конденсатор действует как накопитель электрической энергии и, как правило, состоит из двух проводящих пластин, разделённых непроводящим материалом (диэлектриком). В качестве диэлектрика обычно выступает воздух, пластик или керамика. Простая математическая модель конденсатора приведена на рис. 1.

Рис. 1 Простая модель конденсатора (С)
Диэлектрическая проницаемость ε включает в себя две составляющие — εr и ε0, где εr – это относительная магнитная проницаемость (иногда называемая диэлектрической постоянной) материала между пластинами и ε0 – электрическая постоянная (ε0 ≈ 8.854×10−12 Ф/м).
Многие датчики работают по ёмкостному принципу, в особенности тактильные датчики таких устройств, как планшеты и мобильные телефоны. Эти ёмкостные датчики определяют отсутствие или присутствие пальца человека и работают как альтернатива кнопочному переключателю. Присутствие пальца человека – или скорее воды в нём – приводит к изменению относительной диэлектрической проницаемости вызывающей в свою очередь изменение ёмкости.
Другой тип ёмкостного датчика – это ёмкостной датчик перемещения, который работает путём измерения изменений ёмкости происходящих из-за изменения размеров конденсатора. Как можно видеть из математической формулы на рис. 1, ёмкость как при изменении расстояния между пластинами (d) так и при изменении площади перекрытия пластин (A). Перемещение может измеряться в осевом направлении (изменение d) или в плоскости пластин. Пластины конденсатора можно с успехом изготавливать с использованием печатных плат.
Другой тип ёмкостного датчика – это ёмкостной датчик перемещения. Принцип его работы основан на измерении величины емкости, которая изменяется при изменении размеров конденсатора. Как можно видеть из математической формулы на рис. 1, ёмкость прямо пропорциональна как расстоянию между пластинами (d), так и площади перекрытия пластин (A). Перемещение может измеряться в осевом направлении (изменение d) или в плоскости пластин. Пластины конденсатора можно с успехом изготавливать с использованием печатных плат.
Для того чтобы хранить сколько-нибудь значительный заряд, расстояние между пластинами d должно быть существенно меньше площади пластин. Величина d обычно гораздо меньше 1 мм. По этой причине такая технология хорошо подходит для измерения нагрузки и тензометрических датчиков, поскольку может давать сравнительно большие изменения сигнала при маленьком измеряемом расстоянии. Похожим образом, ёмкостные линейные или вращающиеся датчики могут быть сконструированы таким образом, что перемещение вызывает изменение площади перекрытия пластин A. Например, один комплект пластин расположен на подвижной части датчика, а другой комплект расположен на статичной части. Как только два этих комплекта смещаются относительно друг друга, площадь А изменяется.
К сожалению, кроме изменения размеров конденсатора, ёмкость также чувствительна и к другим факторам. Если пластины конденсатора окружены воздухом то диэлектрическая проницаемость будет изменяться из-за влияния температуры и влажности, поскольку диэлектрическая постоянная воды отличается от воздуха. Близко расположенный объект, который изменяет проницаемость окружающего пространства, тоже будет вызывать изменения ёмкости. В случае тактильного датчика, вода в пальцах вызывает местное изменение проницаемости и, соответственно, срабатывание датчика. Вот почему работа нереагирующего тактильного датчика может быть улучшена, если намочить конец пальца.
За исключением случаев, когда окружающая среда датчика может быть герметично замкнута или жёстко контролируема, ёмкостные датчики не подходят для применения в жёстких условиях окружающей среды, где есть возможность проникновения посторонних веществ или больших изменений температуры. Неудивительно, что ёмкостные датчики мало подходят для применения в условиях, где высока вероятность образования конденсата при снижении температуры.
При неизменном физическом устройстве датчика, расстояние между пластинами датчика должно поддерживаться малым относительно размеров пластин конденсатора и выдерживаться в достаточно узком допуске. Это может накладывать очень высокие требования по механической точности установки датчика в конечное изделие и может быть непрактично и неэкономично, поскольку различие тепловых расширений, вибраций или механических допусков конечного изделия могут привести к изменению расстояния между пластинами и, таким образом, к искажению измерений.
Более того ёмкостный эффект основан на хранении электрического заряда на пластинах конденсатора. Если конечное изделие, куда устанавливается датчик, может создавать электростатическое поле в процессе своего перемещения – от трения, скольжения или вращения деталей – это может искажать показания датчика. В экстремальных случаях датчик не будет работать совсем или, что хуже, электростатические возмущения будут приводить к правдоподобным, но неверным показаниям датчика. В некоторых случаях обязательно заземление компонентов конечного изделия для рассеивания заряда с пластин датчика. Часто это является необходимым в ёмкостных датчиках угла, поскольку вращение вала создаёт статический заряд из-за относительного перемещения подшипников, шестерён, шкивов и прочее.
Принцип работы – Индуктивные датчики
В 1831 Майкл Фарадей открыл, что протекание переменного тока по одному проводнику индуцирует протекание тока в противоположном направлении во втором проводнике. С тех пор магнитная индукция стала широко использоваться как физический принцип построения датчиков для измерения положения и скорости – резольверы (СКВТ), сельсины и дифференциальный трансформатор для измерения линейных перемещений. Основы теории можно объяснить, рассматривая две катушки: передающую катушку (Tx), по которой протекает переменный ток, и приёмную катушку (Rx), в которой индуцируется ток.

Рисунок 2. Закон индукции Фарадея
Величина напряжения на приёмной обмотке пропорциональна относительным площадям, геометрии и смещению двух катушек. Однако, как и с ёмкостной технологией, на поведение катушек могут влиять и другие факторы. Одним из таких факторов является температура, но её влияние может быть нивелировано путём использования нескольких приёмных катушек и вычислении положения по отношению полученных сигналов (как в дифференциальном трансформаторе). Соответственно, даже в случае изменений температуры, её влияние на результат компенсируется, поскольку отношение сигналов является неизменным для любого положения.
В отличие от ёмкостных способов измерения, индуктивная технология гораздо менее подвержена влиянию посторонних частиц, таких как вода или грязь. Поскольку катушки могут находиться на относительно большом расстоянии друг от друга, точность установки составляет гораздо меньше проблем, и основные компоненты индуктивного датчика могут быть установлены с относительно свободными допусками. Это не только помогает снизить стоимость датчика и конечного изделия, но также позволяет использовать компоненты с защитным покрытием или заливкой, что позволяет датчикам противостоять таким внешним воздействующим факторам, как длительное погружение, сильные удары, вибрация или наличие взрывоопасной газовой или пылевой среды.
Индуктивные датчики обеспечивают надёжный, стабильный и устойчивый к внешним воздействиям подход к измерению положения и, таким образом, является предпочтительным выбором в приложениях, где жёсткие условия окружающей среды являются нормой, например, в военной технике, авиакосмической промышленности, промышленных установках и системах для нефтегазового сектора.
Несмотря на надёжность и устойчивость к внешним воздействиям, традиционные индуктивные датчики имеют ряд отрицательных сторон, которые препятствуют их более широкому распространению. В их конструкции есть проводники, намотанные на катушки, которые должны быть намотаны достаточно точно, чтобы обеспечить необходимую точность измерений положения. Для того, чтобы обеспечить наличие достаточно сильного электрического сигнала, необходимы обмотки с большим количеством витков. Такая конструкция с намотанной катушкой делает традиционный индуктивный датчик громоздким, тяжёлым и дорогим.
Инженеры, рассматривающие возможность применения индуктивных датчиков положения, часто задают вопрос о сложностях, связанных с электромагнитными шумами. В данном случае такая озабоченность является неуместной, если принять во внимание, что эти датчики, как резольверы, успешно используются много лет в жёсткой электромагнитной установке в корпусах электродвигателей для коммутации и управления скоростью. Что касается температурной стабильности, то устойчивость к жёстким условиям может быть достигнута при использовании дифференциального подхода, так, что электромагнитная энергия, поступающая в различные части системы, эффективно компенсирует друг друга. Вот почему индуктивные датчики, такие как резольверы и дифференциальные линейные трансформаторы, являются предпочтительным выбором в ответственных применениях, например, в гражданской авиации в течение многих лет.
Другой подход к индуктивным датчикам
Другой подход к индуктивным датчикам использует тот же физический принцип, но в нём применяются плоские конструкции на основе печатных плат вместо намотанных катушек. Именно этот подход и применяется Zettlex. Это означает, что обмотки могут быть изготовлены путём травления меди или при помощи нанесения на самые различные материалы подложки: полиэстерную плёнку, бумагу, эпоксидный слоистый пластик и даже на керамику. Такие печатные конструкции можно изготовить более точно, чем намотанные катушки. Вследствие чего достигается более высокая точность измерения при меньших затратах, размерах и массе, сохраняя в то же время все положительные свойства индуктивной технологии.

Рисунок 3. Пример грязного, но полностью работоспособного индуктивного датчика с плоской печатной обмоткой.
Датчики серии IncOders компании Zettlex – это бесконтактные устройства для прецизионного измерения угла. Датчик IncOder состоит из двух частей: статор и ротор, каждая из которых имеет форму плоского кольца. Большое центральное отверстие позволяет легко пропускать валы, оптические волокна, трубы и кабели, размещать токосъёмники. Индуктивные угловые энкодеры серии IncOder не требуют точной механической установки, скорее можно сказать, что ротор и статор должны быть просто привинчены в конечное изделие. Угловые энкодеры Zettlex не восприимчивы к посторонним веществам, что делает их идеально подходящими к жёстким условиям окружающей среды, где ёмкостные устройства работают ненадёжно.
Заключение
Преимущества каждого из трёх подходов сведены вместе в таблице ниже. Можно сделать вывод, что из трёх приведённых подходов, нетрадиционный индуктивный подход, использующий печатные обмотки, обеспечивает наибольшее количество преимуществ.
|
Ёмкостные |
(Традиционные катушки) |
Индуктивные |
|
| Высокое разрешение |
✓ |
✓ |
✓ |
|
Высокая повторяемость |
✓ |
✓ |
✓ |
| Высокая точность |
✓ |
✓ |
✓ |
|
Устойчивость к грязи, воде или конденсату |
✓ |
✓ |
|
|
Устойчивость к электростатике |
✓ |
✓ |
|
|
Устойчивость к электромагнитным помехам |
✓ |
✓ |
✓ |
|
Низкий температурный дрейф |
✓ |
||
|
Простота установки |
? |
✓ |
|
|
Компактный |
✓ |
✓ |
|
|
Лёгкий |
✓ |
✓ |
|
|
Экономичный |
? |
✓ |
Рисунок 4. Таблица сравнительных преимуществ каждой технологии
Eмкостные датчики присутствия — Студопедия.Нет
Поскольку человеческое тело представляет собой среду с высокой диэлектрической проницаемостью (на частоте 40 МГц диэлектрическая константа мышц, кожи и крови приблизительно равна 97, а жира и костей — 15), между ним и окружающими предметами возникают различные емкостные связи. Величины появляющихся переходных емкостей определяются такими факторами, как размер тела, материал одежды , тип окружающих объектов, погода и т.д. Обычно он лежит в диапазоне от нескольких пикофарад до нескольких нанофарад. При движении человека величины этих емкостей меняются, что дает возможность отделить движущиеся объекты от статических. На самом деле все объекты связаны друг с другом некоторыми емкостными связями. И если эти связи в какой-либо зоне зафиксировать, появление любого нового объекта в окрестности этой зоны приведет к нарушению установившихся связей. На рисунке 2.1.1 показано, что первоначально емкость между тестовой пластиной и землей (здесь, под словом «земля» подразумевается любой большой объект, такой как земля, озеро, автомобиль, корабль, самолет и т.д.) равна С1. При вторжении человека в окрестность этой пластины формируются два дополнительных конденсатора: Са — между пластиной и телом и Сь — между телом и землей. Поэтому суммарная емкость между пластиной и землей увеличится на величину ΔС
 (2.1.1)
(2.1.1)
Это изменение емкости может быть зафиксировано при помощи соответствующей аппаратуры и использоваться для детектирования присутствия людей в охраняемой зоне.
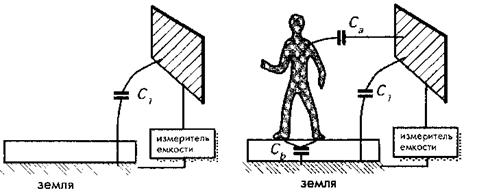
Рисунок 2.1.1-Человек вносит дополнительную емкость в схему детектора
На рисунке 2.1.2 показана емкостная охранная система для автомобиля . Чувствительный элемент вмонтирован в сидение автомобиля. Он может быть изготовлен в виде металлической пластины или сетки, электропроводной ткани и т.д. Чувствительный элемент формирует одну из пластин конденсатора Ср. Второй пластиной этого конденсатора может быть либо корпус автомобиля, либо отдельная пластина, расположенная под ковриком на полу. В качестве эталонного конденсатора Сх используется либо постоянный, либо переменный конденсатор. Его необходимо размешать недалеко от сидения. Эталонный и чувствительный конденсаторы подключаются к соответствующим входам детектора зарядов (через резисторы R1, и R2). Для уменьшения паразитных наводок соединительные провода следует скручивать. Дифференциальный детектор зарядов управляется генератором прямоугольных импульсов (рис. 6.5). Когда на сидении никто не сидит, эталонный конденсатор устанавливается приблизительно равным конденсатору Ср Резисторы и соответствующие конденсаторы определяют постоянные времени двух цепей В исходном состоянии обе RC цепи имеют одинаковые постоянные времени, равные т( Напряжения с резисторов подаются на входы ОУ, выходной сигнал которого Ус практически равен нулю Небольшие пики на выходном сигнале свидетельствуют о некотором разбалансе схемы Когда человек садится на сидение, его тело формирует дополнительную емкость параллельно Ср, что приводит к увеличению постоянной времени цепи от τ1, до τ2 Это сказывается на увеличении амплитуды пиков на выходе ОУ Компаратор сравнивает Vc с эталонным уровнем напряжения Vref Когда Vc становится больше Vref компаратор посылает сигнал на логическое устройство, вырабатывающее сигнал тревоги V, свидетельствующий о том, что в машине кто-то находится Следует отметить, что емкостной детектор является активным устройством, поскольку для его работы необходим сигнал генератора
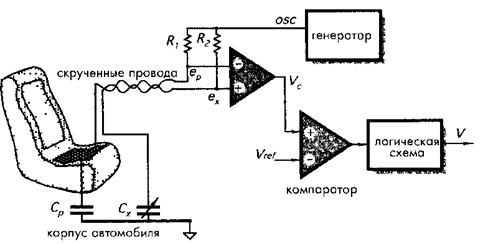
Рисунок 2.1.2-Емкостной детектор для охраны автомобиля
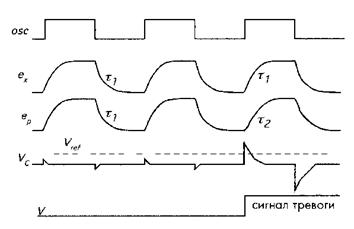
Рисунок 2.1.3-Временные диаграммы работы емкостного датчика
Когда емкостной датчик присутствия используется рядом или на металлических устройствах, его чувствительность может быть несколько снижена из-за паразитных емкостных связей между электродом и металлическими частями. Эффективный способ борьбы с паразитными емкостями — применение экранов. На рисунке 2.1.4А роботе металлической рукой. Рука движется рядом с людьми и другими потенциапьно проводящими объектами и может с ними столкнуться, если управляющий компьютер робота не получит информацию о близости руки с препятствием. При приближении любого объекта к руке робота формируется емкостная связь между ним и рукой, равная Сs0. Рука робота покрыта электрически изолированной проводящей оболочкой, называемой электродом. На рисунке 2.1.1 показано, как можно при помощи детектирования емкостной связи определять присутствие людей в окрестности датчика. Однако массивная металлическая рука робота (рисунок 2.1.4Б) имеет гораздо более сильную емкостную связь с электродом, чем образуемая связь между электродом и объектом. Элегантное решение этой проблемы — размещение между электродом и рукой робота промежуточного экрана (рисунок 2.1.4В).
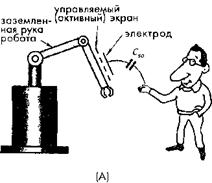
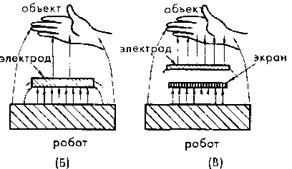
Рисунок2.1.4— Емкостной датчик приближения. Управляемый экран располагается на металлической руке заземленного робога (А). Без экрана электрическое поле в основном сосредоточено между электродом и роботом (Б), тогда как экран помогает перенаправить поле в область между электродом и объектом (В)
Роль датчика приближения здесь выполняет многослойное покрытие руки робота, в котором нижний слой является диэлектриком, после него идет большой токопроводящий экран, а верхний слой представляет собой узкую пластину электрода. Для уменьшения емкостной связи между электродом и рукой робота, потенциал экрана должен быть равен потенциалу электрода, следовательно, на экран надо подавать напряжение, равное напряжению электрода (поэтому такой экран часто называется управляемым экраном). При выполнении этого условия между экраном и электродом не будет никакого электрического поля, а между экраном и рукой робота возникнет сильное электрическое поле. При этом между электродом и объектом также формируется достаточно сильное электрическое поле.
На рисунок 2.1.5 показана упрощенная схема генератора прямоугольных импульсов, частота которых зависит от значений входной емкости, состоящей из следующих емкостей: Сsg, (между датчиком и землей), Сso(между датчиком и объектом) и Cog (между объектом и землей). Электрод соединен с экраном через повторитель напряжения. Частотно-модулированный сигнал поступает в компьютер робота, управляющий движением его руки. Такое устройство позволяет детектировать соседние проводящие объекты на расстоянии 30 см.